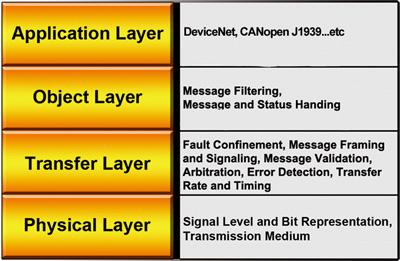
CAN Bus Features
The Controller Area Network (CAN) is a serial communication way, which efficiently supports distributed real-time control with a very high level of security. It provides the error process mechanisms and message priority concepts. These features can improve the network reliability and transmission efficiency. Furthermore, CAN supplies the multi-master capabilities, and is especially suited for networking “intelligent” devices as well as sensors and actuators within a system or sub-system.
Multi-master
When the bus is free any unit may start to transmit a message. The unit with the message of highest priority to be transmitted gains bus access.
Safety
In order to achieve the utmost safety of data transfer, powerful measures for error detection, signaling and self-checking are implemented in every CAN node. When transmitting data, many measuring algorithms including Cyclic Redundancy Check, Message Frame Check and Bit Stuffing have been taken.
Speed & Distance
Baud (bit/sec) |
Ideal Bus Length |
1M |
25 |
800K |
50 |
500K |
100 |
250K |
250 |
125K |
500 |
50K |
1000 |
20K |
2500 |
10K |
5000 |
Arbitration
If two or more nodes start transmitting messages at the same time, the arbitration mechanism is applied to guarantee that one of these messages can be sent successfully according to the priority.
Priorities
The CAN IDENTIFIER defines a static message priority during bus access.

|