|
|
 |
|
| |
|
|
|
|
| |
|
I-7540D 
CAN to Ethernet Gateway |
|
|
|
|
|
|
|
| |
|
|
| |
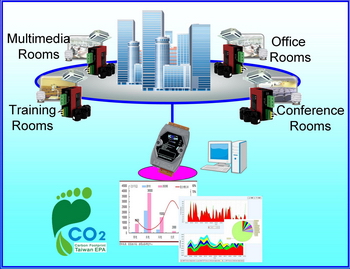
Internet communications using TCP/IP is increasing in the industrial sector. Using Ethernet for network in industrial area is appealing because the required cabling is already installed. The CAN-Ethernet Gateway from ICP DAS is a solution that enables CAN networks to be coupled together over the Internet/Ethernet, whereby remote monitoring and control is possible. The CAN-Ethernet Gateway controls networked communication and makes a transparent CAN-based application interface available to the user.
The device supports a transparent, protocol-independent transfer of the CAN messages, thus allowing its implementation into a wide range of possible applications. Furthermore, the CAN-Ethernet Gateway can be used with various higher layer CAN protocols (e.g. CANopen, DeviceNet or other proprietary protocols). The following figure shows the application architecture for CAN-Ethernet Gateway .
Furthermore, I-7540D also can be used as Ethernet to CAN/RS-232/485 Device Server. The Device Server is an appliance that network enables any device with a serial communication port. By virtue of its independent operating system, protocol independence, small size and flexibility, Device servers are able to meet the demand of virtually any network-enable application. Most devices don't have network ports. I-7540D allows those devices to become connected to the network.
|
|
| |
|
|
|
| |
|
| |
|
| |
•Factory Automation
•Building Automation
•Home Automation
•Control System
•Monitor System
•Vehicle Automation |
 |
|
| |
|
|
|
| |
|
|
| |
|
|
| |
The VxComm technology can be used to simulate COM/CAN ports of the I-7540D to become a COM port of PC . With the help of VxComm driver, users can access the remote COM/CAN ports of the I-7540 just as them would access the PC's COM port. The block diagram of data processes in I-7540D is given as follows: |
|
|
| |
|
|
|
|
|
| |
|
|
| |
|
|
| |
- 80186-80 Embedded CPU, or compatible
- Ethernet Protocols, TCP,UDP,IP,ICMP,ARP
- 10/100 Base-TX Ethernet Controller
- Reloadable Operating Software
- Message transmitted by using TCP/IP protocol
- Diagnostics
- COM driver support interrupt & 1K QUEUE Input & Output buffer
- Support one RS-232 port, one RS-485 port and one CAN port
- 2500Vrms photo-isolation protection on CAN side.
- Jumper select 120Ω terminator resistor for CAN channel
- Phillip 82C 250/251CAN Transceiver
- Support both CAN specification 2.0A and 2.0B.
- Max transmission speed up to 1M bps for CAN and 115.2kbps for RS-232 & RS-485
- Max transmission distance of CAN over 1000m (follow CAN specification)
- Built-in self-tuner ASIC controller on RS-485 port
- 7-segment LED display.
- Software configurable CAN and RS-232 communication parameters
- Firmware updated from COM1 or Ethernet port
- Support Web Configuration
- Support maximum 25 Ethernet clients connection
- Support for Virtual COM technology
|
|
| |
|
|
|
|
|
| |
|
|
| |
|
|
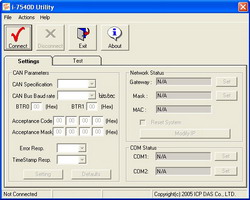
| |
|
-
IP 、 Gateway 、 Mask configuration
-
CAN bus Baud rate configuration
-
CAN BTR0 and BTR1 configuration
-
CAN acceptance filter configuration
-
CAN 2.0A or 2.0B specific selection
-
Error code Responded selection
-
Easy test to transmit/receive CAN messages
|
|
|
| |
|
|
|
|
|
| |
|
|
| |
|
|
| |
| Item |
Description |
CAN bus Power Meter |
This is the software solution for the CAN bus power meter(PM-213x-CAN). It is convenient to collect the distributed power information via CAN bus. [more...] |
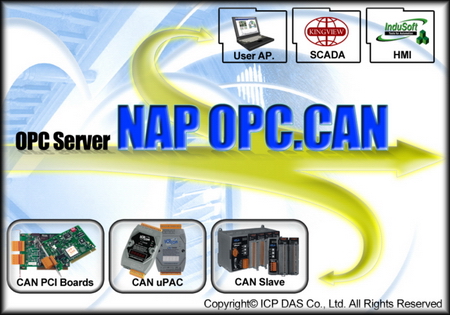
CAN OPC Server |
This is the OPC server for all the SCADA like LabVIEW, iFix, DASYLab and etc. By using the OPC server, the users be able to control any CAN devices via the famous SCADA. [more...] |
VxCAN Driver |
The VxCAN driver is the virtual CAN driver for all CAN converters and CAN master products. Even using different products, the users could use the same APIs to develop any CAN applications. [more...] |

InduSoft Driver |
The IndoSoft is one of the famous and high performance SCADA. Nowaday, it supports the CAN, CANopen and DeviceNet driver for all the coresponding converter or master series products. [more...] |
CANcheck |
This is the software for diagnosing and testing the user's CAN devices. The graphical interface is ready-made and easy to operate. [more...] |
CAN Test Tool |
The CAN test tool can help users to test the CAN communication of CAN series of ICP DAS by the simple steps. This tool is based on VxCAN driver and supports most of all CAN products of ICP DAS [more...] |
|
|
| |
|
|
| |
|
|
|
|
|
| |
|
|
| |
|
|
| |
The test is the performance which transfer 8 bytes data frame from CAN to Ethernet (one TCP client). |
CAN setting |
Transfer frames |
Transfer time(ms) |
Ethernet setting |
Receive frames |
Receive time (ms) |
The max frames/sec |
Data<8 byes/frme |
ASCII command length |
2.0A 1Mbps |
1,000,000 |
619,831 |
100M |
1,000,000 |
619,871 |
1613 |
>=1613 |
22 B |
2.0B 1Mbps |
1,000,000 |
662,432 |
100M |
1,000,000 |
662,513 |
1509 |
>=1509 |
27 B |
The test is the performance which transfer 8 bytes data frame from Ethernet (one TCP client) to CAN. |
CAN setting |
Transfer frames |
Transfer time (ms) |
Ethernet setting |
Receive frames |
Receive time (ms) |
The max frames/sec |
Data<8 byes/frame |
ASCII command length |
2.0A 1Mbps |
1,000,000 |
535,280 |
100M |
1,000,000 |
535,618 |
1867 |
>=1867 |
22 B |
2.0B 1Mbps |
1,000,000 |
563,170 |
100M |
1,000,000 |
563,395 |
1774 |
>=1774 |
27 B |
|
|
| |
|
|
|
|
|
| |
|
|
| |
|
|
| |
Hardware
|
EEPROM |
16 KB; Data retention: 40 years; 1,000,000 erase/write cycles |
CAN Interface |
Controller |
NXP SJA1000T with 16 MHz clock |
Transceiver |
NXP 82C250 |
Channel number |
1 |
Connector |
2-pin screwed terminal block (CAN_L, CAN_H) |
Baud Rate (bps) |
10 k, 20 k, 50 k, 125 k, 250 k, 500 k, 800 k, 1 M (allow user-defined baud rate) |
Isolation |
1000 VDC for DC-to-DC, 2500 Vrms for photo-couple |
Terminator Resistor |
Jumper for 120 Ω terminator resistor |
Specification |
ISO-11898-2, CAN 2.0A and CAN 2.0B |
UART Interface |
COM 1 |
RS-232 |
COM 1 Connector |
5-pin screwed terminal block (TxD, RxD, RTS, CTS, GND ) |
COM 2 |
RS-485 (Self-turner inside) |
COM 2 Connector |
2-pin screwed terminal block (DATA+, DATA-) |
Baud Rate (bps) |
110, 150, 300, 600, 1200, 2400, 4800, 9600, 19200, 38400, 57600, 115200 |
Data bit |
7, 8 |
Stop bit |
1 |
Parity |
None, Even, Odd |
Ethernet Interface |
Controller |
10/100Base-TX Ethernet Controller (Auto-negotiating, Auto_MDIX) |
Connector |
RJ-45 with LED indicator |
Power |
Power supply |
Unregulated +10 ~ +30 VDC |
Protection |
Power reverse polarity protection, Over-voltage brown-out protection |
Power Consumption |
2.5 W |
Mechanism |
Installation |
DIN-Rail |
Dimensions |
72mm x 122mm x 33mm (W x L x H) |
Environment |
Operating Temp. |
-25 ~ 75 ℃ |
Storage Temp. |
-30 ~ 80 ℃ |
Humidity |
10 ~ 90% RH, non-condensing |
|
|
| |
|
|
|
|
|
| |
|
|
| |
|
|
| |
I-7540D-G
|
Internet communication controller with one CAN bus, one RS-232, one RS-485 and one Ethernet
|
I-7540D-G CR
|
Internet communication controller with one CAN bus, one RS-232, one RS-485 and one Ethernet (RoHS)
|
|
|
| |
|
|
|
|
|
| |
|
|
| |
|
|
| |
|
wall-plug power Adapter/ 110VAC, 60Hz, 3.6W
|
|
wall-plug power Adapter/ 220VAC, 50Hz, 3.6W
|
|
9-pin Female D-sub & 3-wire CAN bus cable (1M) |
|
7/14 channel Surge Protector |
|
EMI Ferrite Split/Snap-On Core
|
|
Field-Installation A-coded 5-pin Female
|
|
|
| |
|
|
| |
|
|
|
|