|
|
 |
|
| |
|
|
|
|
| |
|
I-7530A
RS-232/422/485 to CAN Converter |
|
|
|
|
|
|
|
| |
|
|
| |
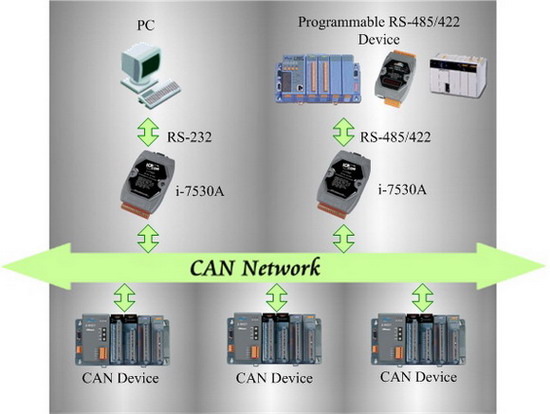
CAN (Controller Area Network) is a serial bus system especially suited to structure intelligent industry devices networks and build smart automatic control systems. The following figure shows the application architecture for I-7530A modules. The PC can be the CAN host, monitor or HMI to access/control the CAN device through the CAN network by the I-7530A Converter. The programmable RS-232/485/422 device (For example: I-8411/I-8431/I-8811/I-8831/W-8031/W-8331/W-8731 embedded controller) can use the serial port to connect to the CAN network via the I-7530A module. In order to use the CAN network with traditional RS-232/485/422 devices, we provide a way to achieve this purpose. The I-7530A is designed to unleash the power of CAN bus via RS-232/485/422 communication method. It accurately converts messages between CAN and RS-232/485/422 networks. This module let you to communicate with CAN devices easily from any PC or devices with RS-232/485/422 interface.
Moreover, we expand the functionalities of I-7530A for some special application. In pair connection mode, I-7530A can be used to connect PC with other RS-232/485/422 devices at the same time. The application architecture may be as follows.

3000V isolation on CAN side
The CAN port of I-7530A is an isolated with 3000V isolation. This isolation can protect the local RS-232/485/422 devices from the damage signal coming from CAN network.
Watchdog inside
The I-7530A Watchdog is a hardware reset circuit to monitor the I-7530A’s operation status. When working in harsh or noisy environment, the I-7530A may be down by the external signal. The circuit may let the I-7530A to work continuously and never halt.
Power and Error indicator display
There are two indicators on the I-7530A.The power indicator can help user to check whether the I-7530A is standby or transmitting/receiving messages. The Error indicator will be turned on when some errors occur on the I-7530A.
|
|
|
|
|
| |
|
|
| |
|
|
| |
• Control System•
Building Automation• Factory Automation• Distributed
data acquisition
 |
|
| |
|
|
|
|
|
| |
|
|
| |
|
|
| |
-
Compatible with CAN specification 2.0A and B
-
Fully compatible with ISO 11898-2 standard
-
Support various baud rate from 10K bps to 1M bps
-
Jumper for 120 Ω terminator resistor
-
Software configurable CAN and RS-232 /422/485 communication parameters
-
Power, data flow and error indicator for CAN and RS-232/422/485
-
-
Provide the transparent communication between the RS-232/485/422 devices via CAN bus
-
Enable different RS-232/485/422 devices into an individual group in CAN bus network.
(Full-duplex communication mode of RS-232/422 devices is not supported)
|
|
| |
|
|
|
|
|
| |
|
|
| |
|
|
| |
-
CAN bus Baud rate configuration
-
CAN acceptance filter configuration
-
CAN 2.0A or 2.0B specific selection
-
RS-232/485/422 Baud rate and data bit setting
-
RS-232/485/422 responded selection
-
Easy test to transmit/receive CAN messages
-
Setting for I-7530A communication mode (normal mode or pair connection mode)
|
|
| |
|
|
|
|
|
| |
|
|
| |
|
|
| |
-
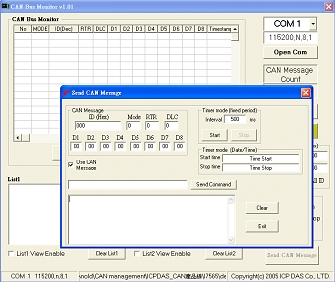
It has a CAN message field which can display the receiving CAN messages in Decimal or HEX mode.
-
Can display the timestamp of each received CAN message.
-
Users can change the display mode, up-down, down-up or stop.
-
It can count the number of received CAN messages.
-
Data Log : It can save the CAN message as “ txt ” file.
-
Has CAN ID filter function.
-
Can send CAN message to CAN BUS according the defined interval time.
|
|
| |
|
|
|
|
|
| |
|
|
| |
|
|
| |
| Item |
Description |
CAN bus Power Meter |
This is the software solution for the CAN bus power meter(PM-213x-CAN). It is convenient to collect the distributed power information via CAN bus. [more...] |
CAN OPC Server |
This is the OPC server for all the SCADA like LabVIEW, iFix, DASYLab and etc. By using the OPC server, the users be able to control any CAN devices via the famous SCADA. [more...] |
VxCAN Driver |
The VxCAN driver is the virtual CAN driver for all CAN converters and CAN master products. Even using different products, the users could use the same APIs to develop any CAN applications. [more...] |

InduSoft Driver |
The IndoSoft is one of the famous and high performance SCADA. Nowaday, it supports the CAN, CANopen and DeviceNet driver for all the coresponding converter or master series products. [more...] |
CANcheck |
This is the software for diagnosing and testing the user's CAN devices. The graphical interface is ready-made and easy to operate. [more...] |
CAN Test Tool |
The CAN test tool can help users to test the CAN communication of CAN series of ICP DAS by the simple steps. This tool is based on VxCAN driver and supports most of all CAN products of ICP DAS [more...] |
|
|
| |
|
|
|
|
|
| |
|
|
| |
|
|
| |
The test is the performance which transfer 8 bytes data frame from CAN to RS232.
|
CAN setting |
Transfer frames |
Transfer time(ms) |
RS-232 setting |
Receive frames |
Receive time (ms) |
The max frames/sec |
Data<8 byes/frme |
RS232 command length |
2.0A 1Mbps |
1,000 |
200 |
115200,n,8,1 |
1,000 |
2954 |
338 |
>=338 |
22 B |
2.0A 1Mbps |
1,000 |
200 |
115200,n,7,1 |
1,000 |
2775 |
360 |
>=360 |
22 B |
2.0B 1Mbps |
1,000 |
200 |
115200,n,8,1 |
1,000 |
3580 |
279 |
>=279 |
27 B |
2.0B 1Mbps |
1,000 |
200 |
115200,n,7,1 |
1,000 |
3337 |
299 |
>=299 |
27 B |
The test is the performance which transfer 8 bytes data frame from RS232 to CAN. |
CAN setting |
Transfer frames |
Transfer time (ms) |
RS-232 setting |
Receive frames |
Receive time (ms) |
The max frames/sec |
Data<8 byes/frame |
RS232 command length |
2.0A 1Mbps |
1,000,000 |
2,612,243 |
115200,n,8,1 |
1,000,000 |
2,612,243 |
382 |
>=382 |
22 B |
2.0A 1Mbps |
1,000,000 |
2,441,130 |
115200,n,7,1 |
1,000,000 |
2,441,130 |
409 |
>=409 |
22 B |
2.0B 1Mbps |
1,000,000 |
3,142,043 |
115200,n,8,1 |
1,000,000 |
3,142,043 |
318 |
>=318 |
27 B |
2.0B 1Mbps |
1,000,000 |
3,142,043 |
115200,n,7,1 |
1,000,000 |
2,966,646 |
337 |
>=337 |
27 B |
|
|
| |
|
|
|
|
|
| |
|
|
| |
|
|
| |
Hardware |
EEPROM |
2 KB (for system information), 100,000 erase/write cycles |
CAN Interface |
Transceiver |
NXP 82C250 |
Connector |
9-pin male D-Sub (CAN_L, CAN_H, N/A for others) |
Port Channels |
1 |
Buad Rate |
10 k, 20 k, 50 k, 100 k, 125 k, 250 k, 500 k, 800 k and 1 Mbps |
Protection |
3000 VDC power protection on CAN side, 2500Vrms photo-couple isolation on CAN bus |
Terminator Resistor |
Selectable 120Ω terminator resistor by jumper |
Support Protocol |
CAN 2.0A/2.0B |
Receive Buffer |
1000 data frames |
UART Interface |
COM |
RS-232/RS-485/RS-422 (can’t be used simultaneously) |
Connector |
14-pin terminal connector
RS-232 : TxD, RxD, GND
RS-422 : Tx+, Tx-, Rx+, Rx-
RS-485 : DATA+, DATA- |
Baud Rate |
110, 150, 300, 600, 1200, 2400, 4800, 9600, 19200, 38400, 57600, 115200 bps |
Data Bits |
5, 6, 7, 8 |
Stop Bits |
1,2 |
Parity |
None, Even, Odd |
Receive Buffer |
900 data frames |
Power |
Power Consumption |
1W |
Power Requirement |
Unregulated +10VDC ~ +30VDC. Power reverse protection, Over-Voltage brown-out protection |
LED |
Round LED |
ON LED: Power and Data Flow; ERR LED: Error |
Mechanism |
Installation |
DIN-Rail |
Dimensions |
72mm x 118mm x 33mm (W x L x H) |
Environment |
Operating Temp. |
-25℃ to 75℃ |
Storage Temp. |
-30℃ to 80℃ |
Humidity |
10~90% non-condensing |
|
|
| |
|
|
|
|
|
| |
|
|
| |
|
|
| |
I-7530A-G CR
|
Intelligent RS-232/485/422 to CAN converter (RoHS)
|
|
|
| |
|
|
|
|
|
| |
|
|
| |
|
|
| |
|
CAN bus Connector |
|
9-pin Female D-sub & 3-wire CAN bus cable (1M) |
|
7/14 channel Surge Protector |
|
EMI Ferrite Split/Snap-On Core
|
|
Field-Installation A-coded 5-pin Female
|
|
|
| |
|
|
| |
|
|
|
|

