Win-GRAF PC Runtime
Windows based SoftPLC Runtime
特色
• Win-GRAF PC Runtime是基於 Windows 的 SoftPLC Runtime是基於
• 支援Windows 7, 8, 10, 11
• EtherCAT 運動控制 :
• 用於 eLogger與Indusoft (AVEVA Edge)的HMI驅動程序
• C/C++/C#/LabVIEW 的編程介面
• 支援Windows 7, 8, 10, 11
• EtherCAT 運動控制 :
1. 與EtherCAT 主站 PCIe 卡 ECAT-M801結合使用的實時運動控制
2. 用於單軸與多軸控制的PLCopen 功能方塊
3. 支援所有標準 CiA402 EtherCAT 從站驅動器
4. 可在0.5 ms 週期時間下控制多達32軸
• 通訊協議 :
2. 用於單軸與多軸控制的PLCopen 功能方塊
3. 支援所有標準 CiA402 EtherCAT 從站驅動器
4. 可在0.5 ms 週期時間下控制多達32軸
1. EtherCAT
2. Modbus TCP/RTU
3. OPC UA server
• 允許透過共享記憶體整合第三方軟體2. Modbus TCP/RTU
3. OPC UA server
• 用於 eLogger與Indusoft (AVEVA Edge)的HMI驅動程序
• C/C++/C#/LabVIEW 的編程介面
介紹
Win-GRAF PC Runtime for Windows 是一個SoftPLC runtime環境,設計用於在具有windows作業系統的標準/工業PC上開發和執行SoftPLC應用程序。安裝runtime環境後,可以使用Win-GRAF工作台將Windows PC編程為PLC。
SoftPLC支援IEC61131-3標准定義的所有五種編程語言,提供廣泛的編程庫,包括運動控制與現場總線庫。
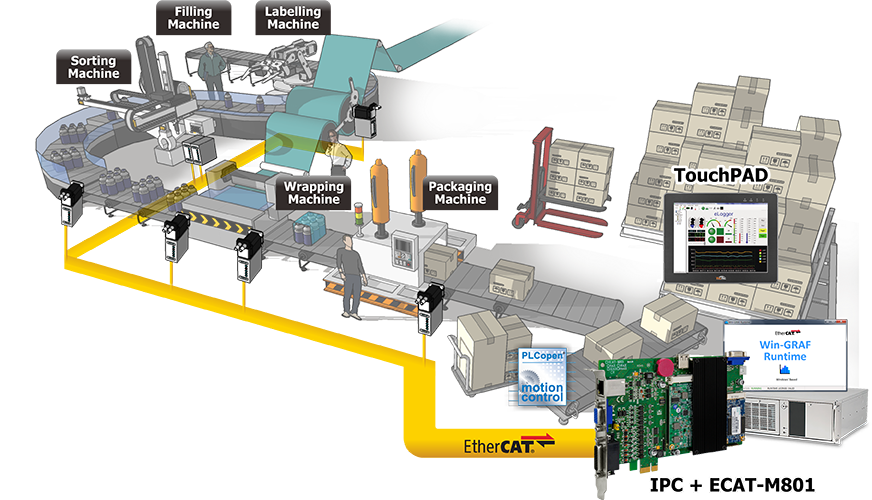
ICPDAS提供的ECAT-M801系列可以實現實時的運動與IO控制。ECAT-M801系列是整合實時EtherCAT主站與多軸運動內核的PCIe卡。其運動引擎與EtherCAT主站一起在實時環境中的專用處理器上運行,以實現對EtherCAT應用程序的時間確定性控制。運動控制功能方塊根據PLCopen(第1、2、4部分)和CiA402來設計,除了使用方便,也大大減少學習和開發的時間。該控制器可以處理多達512個EtherCAT從站和多達32個EtherCAT伺服/步進驅動器。它支援執行簡單和複雜的運動控制,例如單軸和多軸的運動與插補。
OPC UA伺服器是PLC runtime的一部分,是一種安全、開放、可靠的訊息傳輸機制。OPC UA用於機器之間的平行通訊以及機器與更高級別IT系統(SCADA、雲端)之間的垂直通訊。所有標準OPC UA客戶端無需定制即可直接連接到運動控制器,從而降低應用軟體的整合或開發成本。
它所提供的編程介面和共享記憶體通訊,允許Windows應用程序直接快速存取PLC數據。這使系統開發者能夠整合自主開發或第三方的Windows 軟體,例如 HMI、數據收集和處理應用程序。
Embedded是一個用於配置、編程和監控SoftPLC應用程序的軟體包。此外,還提供了廣泛的編程範例。

SoftPLC支援IEC61131-3標准定義的所有五種編程語言,提供廣泛的編程庫,包括運動控制與現場總線庫。
ICPDAS提供的ECAT-M801系列可以實現實時的運動與IO控制。ECAT-M801系列是整合實時EtherCAT主站與多軸運動內核的PCIe卡。其運動引擎與EtherCAT主站一起在實時環境中的專用處理器上運行,以實現對EtherCAT應用程序的時間確定性控制。運動控制功能方塊根據PLCopen(第1、2、4部分)和CiA402來設計,除了使用方便,也大大減少學習和開發的時間。該控制器可以處理多達512個EtherCAT從站和多達32個EtherCAT伺服/步進驅動器。它支援執行簡單和複雜的運動控制,例如單軸和多軸的運動與插補。
OPC UA伺服器是PLC runtime的一部分,是一種安全、開放、可靠的訊息傳輸機制。OPC UA用於機器之間的平行通訊以及機器與更高級別IT系統(SCADA、雲端)之間的垂直通訊。所有標準OPC UA客戶端無需定制即可直接連接到運動控制器,從而降低應用軟體的整合或開發成本。
它所提供的編程介面和共享記憶體通訊,允許Windows應用程序直接快速存取PLC數據。這使系統開發者能夠整合自主開發或第三方的Windows 軟體,例如 HMI、數據收集和處理應用程序。
Embedded是一個用於配置、編程和監控SoftPLC應用程序的軟體包。此外,還提供了廣泛的編程範例。
應用
相似產品
| 軟體 | |
|---|---|
| OS | SoftPLC runtime for Windows OS |
| 服務 | • Support of eLogger and Indusoft • Win-GRAF Workbench : Programming environment (not included in the package) • PLCopen : Single axis and coordinated motion • Shared memory DLL for 3rd party software integration • HMI interfaces for eLogger and Indusoft |
| Utility | EtherCAT Utility Runtime configuration software |
| 插補 | |
|---|---|
| 圓弧補間 | any 2- or 3-axis |
| 直線補間 | any 2- or 32-axis |
| 乙太網路 | |
|---|---|
| 內建 Web Server | Web Server (eLogger or Indusoft required) |
| 通訊協定 | OPC UA Server TCP, UDP Slave/Master for : Modbus TCP/IP , Modbus RTU, ASCII |
| EtherCAT | |
|---|---|
| 通訊協定 | EtherCAT Master (ECAT-M801 required) |
| 軸數 | Up to 32 axes |
| 週期時間 | DC cycle time 0.5 ms |
