|
|
|
|
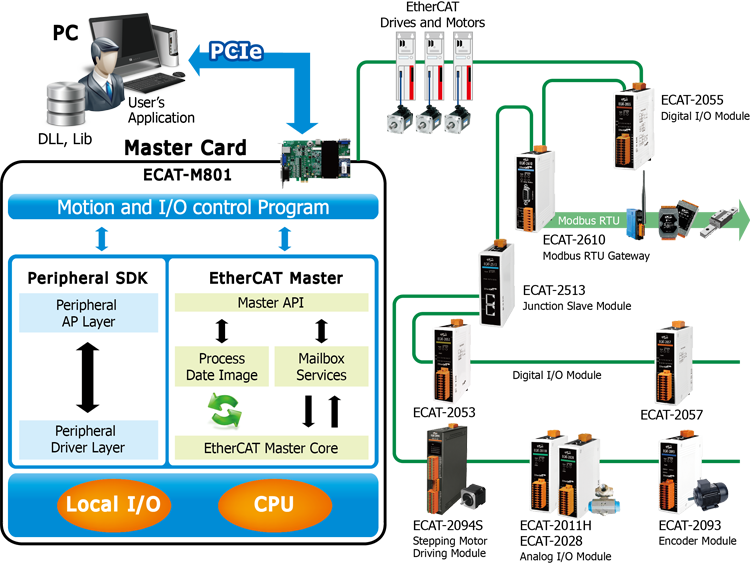
EtherCAT (Ethernet for Control Automation Technology) is an open, high-performance fieldbus system that makes Ethernet technologies
available at the I/O level. EtherCAT provides flexible wiring, fast communication and many other nice features. It needs a master to control
many slaves. ICP DAS provides PC master cards for users to build their motion related applications. This card
can offer multi-axis motion and I/O control functions by its own built-in CPU. In this way, the CPU loading of PC can be reduced dramatically.
In the mean while, ICP DAS also provides many I/O slave modules for users to choose from. Since EtherCAT technology is an industrial standard, those modules can work together in a system with 3rd-party EtherCAT slaves as well.
|
|
|
|
| Applications |
|
|
|
|
|
|
|
| Features |
|
|
|
- Up to 32-axis motion control
- Up to 64 slaves
- Slave operation (SDO, PDO)
- Axis homing
- Single-axis position and velocity control
- Synchronized motion (E-GEAR, E-CAM)
- Virtual axes
- Multi-group motion control
- Multi-axis linear interpolation
- 2D/3D circular interpolation
- Helical interpolation
- On board 13 DI and 13 DO
- On board 2 encoder interfaces with compare trigger output
- API for CiA402 servo drives and ICP DAS stepper motor control modules
- API for ICP DAS DI/DO and AI/AO modules
- Hardware emergency stop
- Supports software second-order filters with low-pass filters, high-pass filters, and notch filters.
- Slave to Slave communication is supported(topology independent)
Tested driver and motor:
| Company |
driver |
motor |
| Panasonic |
A5B & A6B Series |
ac servo motor |
| Yaskawa |
Sigma 7 Series |
ac servo motor |
| Sanyo Denki |
R Series |
ac servo motor |
| Shihlin |
SDP Series |
ac servo motor |
| Hiwin |
D2 Series |
ac servo motor |
| Delta |
ASDA-A2 Series |
ac servo motor |
| Teco |
JSDG2, JSDG2S |
ac servo motor |
| Moons' |
STF Series |
2 phase Stepper motor |
| Oriental Motor |
AZD4A-KED |
AZ Series DC input stepper motors |
|
|
|
|
| Hardware Specifications |
|
|
|
| Model Name |
ECAT-M801-8AX |
ECAT-M801-16AX |
ECAT-M801-32AX |
| Interface |
| Port |
1 x RJ-45 |
| Protocol |
EtherCAT |
| Data Transfer Medium |
Ethernet Cable (Min. CAT 5e), Shielded |
| No. of Slaves |
Max. 64 |
| No. of Axes |
Max. 8 |
Max. 16 |
Max. 32 |
| General |
| Bus Type |
PCI Express x1 |
| Connector |
RJ45 x1
DB-26 (Female)
DB-15 (Female) |
| Operating Temperature |
0℃~+60℃ |
| Storage Temperature |
-20℃~+70℃ |
| Humidity |
0~90% RH, non-condensing |
| Dimensions (L x W x D) |
192mm x 135mm x 21.5mm |
| Digital Output |
| Channels |
13 |
| Type |
Sink (open collector) |
| Load Voltage |
+24 V |
| Max. Load Current |
100 mA/ch |
| Isolation Voltage |
3000 Vrms |
| Digital Input |
| Channels |
13 |
| Type |
Sink / Source |
| On Voltage Level |
+19 V ~ + 24 V |
| Off Voltage Level |
+11 V Max. |
| Isolation Voltage |
3000 V |
| Encoder |
| Channels |
2 |
| Signal Types |
Quadrant, CW/CCW, Pulse/Dir. |
| Speed, Resolution |
1 MHz, 32-bit |
| Compare Trigger
Output |
2-ch |
|
|
|
|
| Ordering Information |
|
|
|
ECAT-M801-8AX |
EtherCAT Master, Max. 8-Axis Synchronously, 13-channel Digital I/O, 2-Axis Encoder |
ECAT-M801-8AX/S |
EtherCAT Master, Max. 8-Axis Synchronously, 13-channel Digital I/O, 2-Axis Encoder
Including a DN-26, a CA-1515M and a CA-2615M |
ECAT-M801-16AX |
EtherCAT Master, Max. 16-Axis Synchronously, 13-channel Digital I/O, 2-Axis Encoder |
ECAT-M801-16AX/S |
EtherCAT Master, Max. 16-Axis Synchronously, 13-channel Digital I/O, 2-Axis Encoder
Including a DN-26, a CA-1515M and a CA-2615M |
ECAT-M801-32AX |
EtherCAT Master, Max. 32-Axis Synchronously, 13-channel Digital I/O, 2-Axis Encoder |
ECAT-M801-32AX/S |
EtherCAT Master, Max. 32-Axis Synchronously, 13-channel Digital I/O, 2-Axis Encoder
Including a DN-26, a CA-1515M and a CA-2615M |
|
|
|
|
| Accessories |
|
|
|
DN-26 |
15-pin and 26-pin Din-Rail mounting I/O connector board |
CA-1515M
|
DB-15 Male (D-sub) to DB-15 Male (D-sub) cable. 1.5 M (180°) |
CA-2615M
|
DB-26 Male (D-sub) to DB-26 Male (D-sub) cable. 1.5 M (180°) |
|
|
| |
|
| TOP |
|
| |
|
| |
|
|