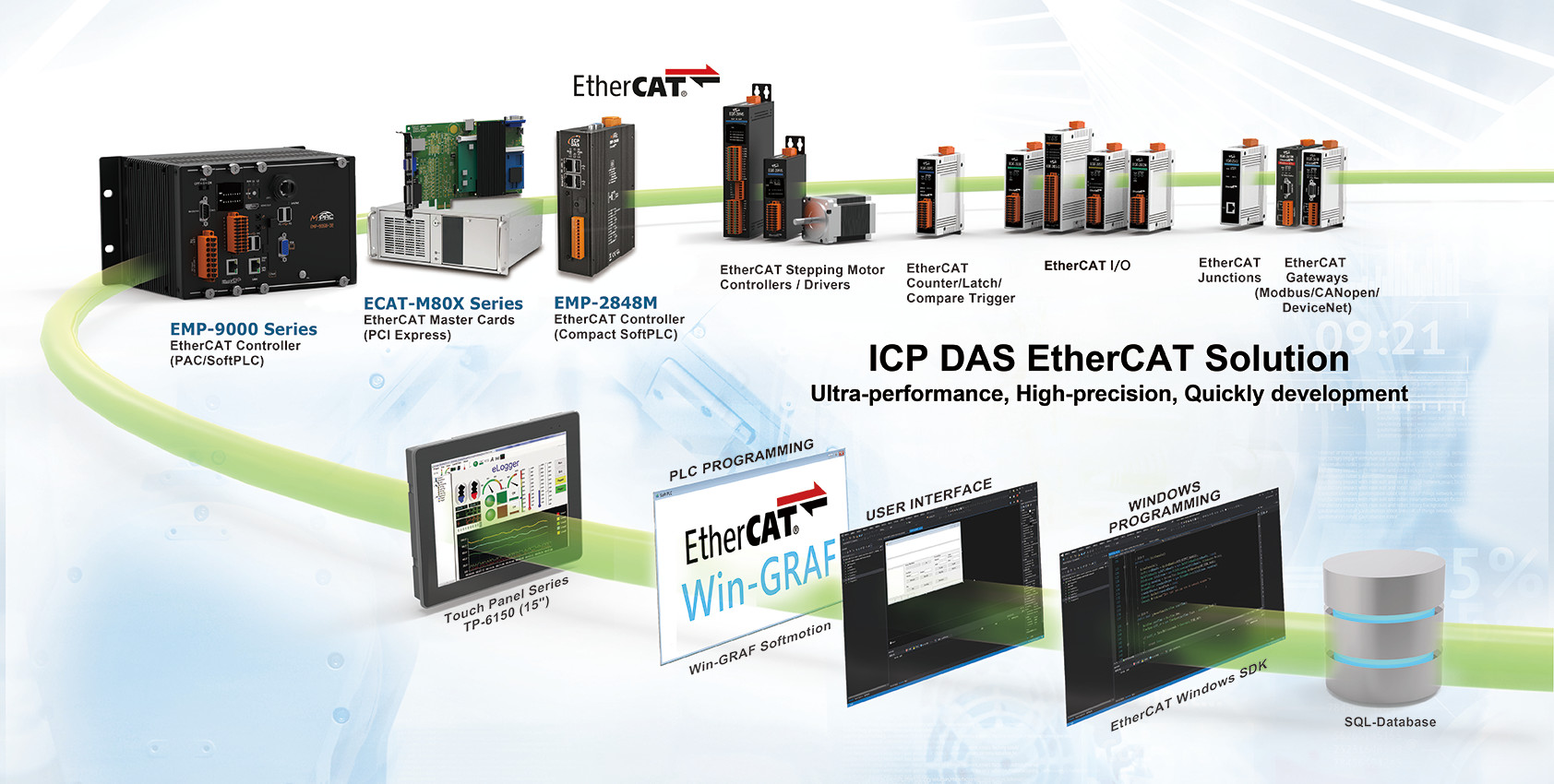
EtherCAT (Ethernet Control Automation Technology) is a series of Ethernet-based industrial communication buses. It has established the mainstream in the industrial automation industry pursuing high precision, high efficiency, and low cost due to its high-speed communication performance and instant communication system.
| EtherCAT Master Product |  ECAT-M801 series |
 EMP-9000 series |
 EMP-2000 series |
 ECATDAQ |
|
|---|---|---|---|---|---|
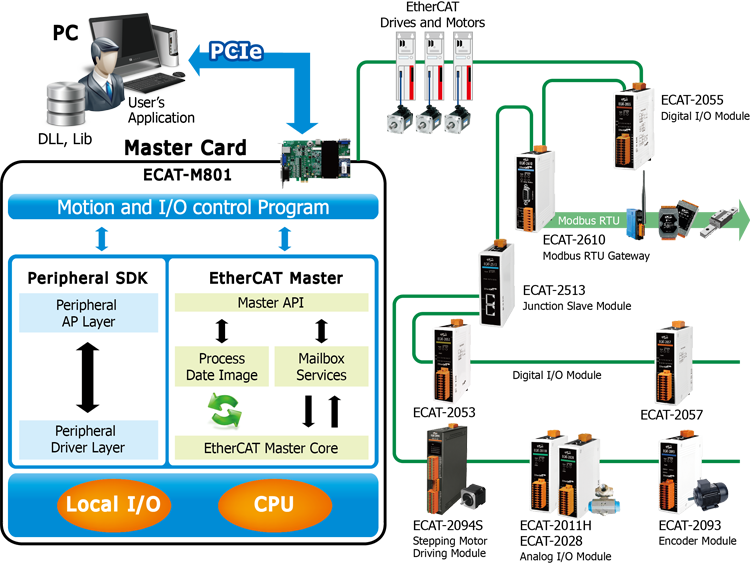
| Type | PCI Express Master Card | PAC/PLC Controller | PLC Controller | Windows DLL | |
| Built-in Digital I/O | 8 DI & 8 DO channels | I/O Expansion units | N/A | N/A | |
| Cycle time | 0.5 ms | 0.5 ms | 0.5 ms | 20 ms | |
| Max. Number of slaves | 512 nodes | 512 nodes | 128 nodes | 20 nodes | |
| Support third-party slave | V | X | |||
| Stepper/Servo Motor Axes | 8~64 axis | 16~32 axis | 16 axis | 8 axis | |
| Motion control function | •Supports CiA402 driver •PLCopen •Multi-axis linear/circular Interpolation /continuous Interpolation /helical Interpolation •Changing position/velocity during motion •T/S Curve |
•Supports CiA402 driver •PLCopen •Real-time •Single axis motion control •T Curve |
•Supports CiA402 driver PP, HOME Mode •Single axis motion control |
||
| Configuration Tool | ECAT Utility | IE/Firefox/Chrome Browser(Web) | N/A | ||
| Software (SDK) | •Windows API •Linux API •Demos for C, C++, C#, VB, Python, LabVIEW |
•Windows API •Demos for C, C++, C#, VB, Python, LabVIEW |
N/A | •Windows API •Demos for C, C++, C#, VB, Python, LabVIEW |
|
| Software (Win-GRAF) | •SoftPLC (Win-GRAF) •OPC UA Server |
N/A | |||
| Note | No need to install additional EtherCAT master card | ||||
Features
EtherCAT (Ethernet Control Automation Technology) is a series of Ethernet-based industrial communication buses. It has established the mainstream in the industrial automation industry pursuing high precision, high efficiency, and low cost due to its high-speed communication performance and instant communication system.
EtherCAT is industrial Ethernet
The optimized EtherCAT data is included in the IEEE 802.3 Ethernet frame. The frame travels through the media at 100 Mbps in full-duplex mode.
Flexible Topologies
With two EtherCAT ports on all devices, no additional switches are required to create a linear network. EtherCAT junction slaves can be used to build tree and star topologies.
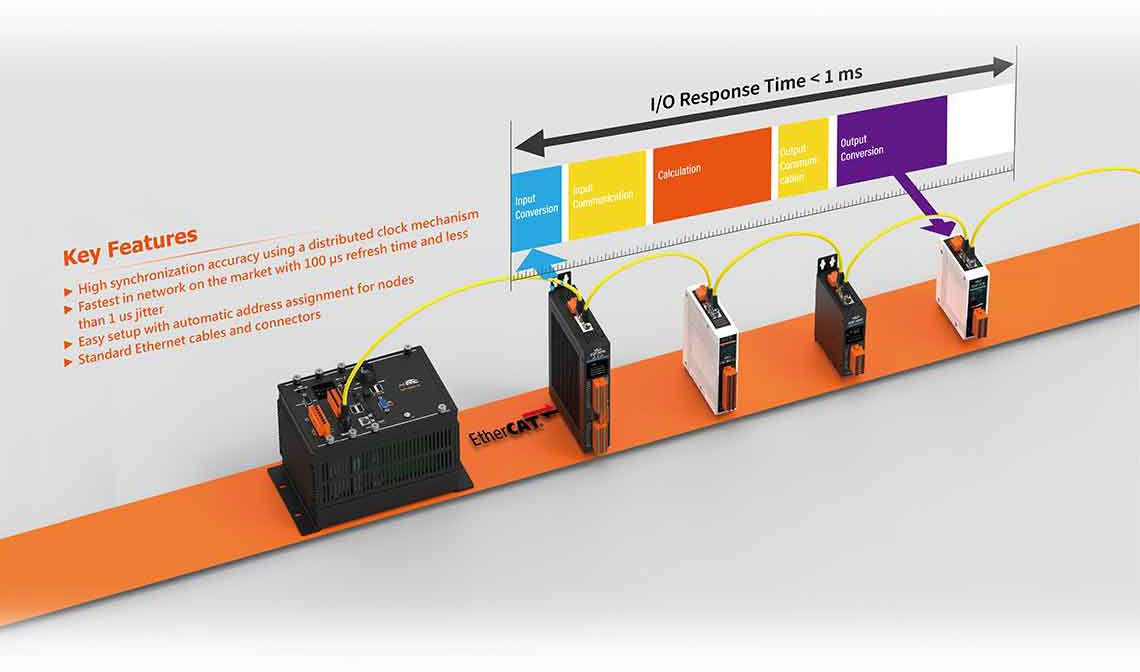
Distributed Clocks
The EtherCAT node slave measures the time difference between incoming and returning frame - timestamp-. With these
timestamps the master can determine the propagation delay offset to the individual slave accurately. This mechanism ensures accurate synchronization between devices with less than 1 μs jitter.
Simple cabling
100Base-TX EtherCAT uses standard 100BASE-TX Ethernet
communication very effi ciently, over standard shielded Ethernet cables and connectors. No need for network switches.
Easy use, easy connect
When compared to a classic fieldbus system, EtherCAT is the obvious choice: node addresses can be set automatically, there’s no need for network tuning, and onboard diagnostics with fault localization make
pinpointing errors a snap. Despite these advanced features, EtherCAT is also easier to use than Industrial Ethernet: there are no switches to configure, and no complicated handling of MAC or IP addresses is required.
Processing on the fly

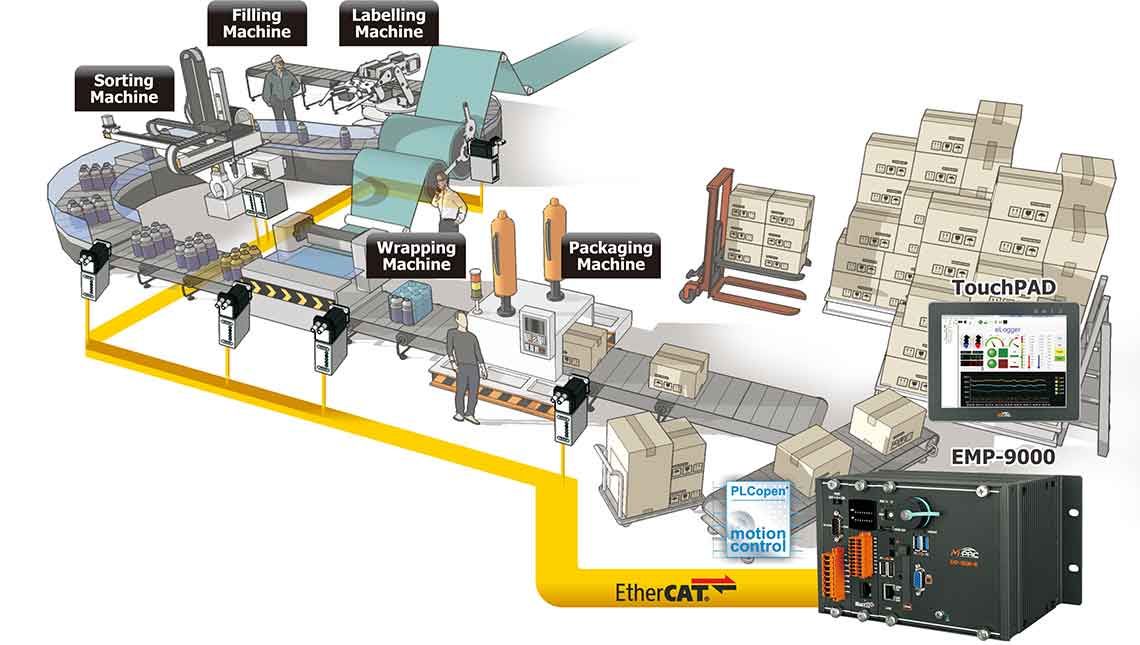
Applications of Motion Control
Access to Parts and Component
- Transfer and stacking device
- Gantry pick and place
- Pick, place, measure, and sort components automatically
Conveying Syste
- Positioning of the workpiece on the conveyor
- Handling and transportation equipment
- Product inspection
- Online Pallet Stacker
- Labeling machine
Parts Assembly Syste
- Precision spot welding machine
- Sealing, gluing, joining applications
- Add glue on the surface to connect parts
- Sealing: apply sealant on the joint surface of the parts
- Dispenser: gluing.
Warehousin
- Automated storage and retrieval system
- Automatically store and retrieve pallets from the storage cabinet
Applications of Cutting, Grinding and Pressing
Semiconductor Manufacturin
- IC inspection
- IC chip installation and assembly
- Pick up components and place them on the printed circuit board
- Camera Detection:
- Check with a mobile camera.
- Use the camera to conduct multi-point inspections
Robot Contro
- Control single axis robot
- Control multiple single-axis robots for spraying applications
- Dual drives: synchronize and move two single-axis robots of the same type
List of Common Drivers and Motors That Have Been Market Tested
| Company | Drivers | Types of Motors |
|---|---|---|
| Delta | ASDA A2-E series | AC Servo Motor |
| Hiwin | D2 series | AC Servo Motor |
| Moons' | STF/RS series | Two-phase Stepper Motor |
| Mitsubishi | MR-JET | AC Servo Motor |
| Oriental Motor | AZ series multi-axis | Closed loop Stepper Motor |
| Panasonic | A5B/A6B series | AC Servo Motor |
| Shihlin | SDP series | AC Servo Motor |
| Sanyo Denki | R series | AC Servo Motor |
| Teco | JSDG2/JSDG2S | AC Servo Motor |
| Yaskawa | Sigma 7 series | AC Servo Motor |
| Master Series
|
||||||||
|
EMP-9001 Series: PAC based Motion Control Series with built-in EtherCAT master
|
||||||||
| Model | ||||||||
|---|---|---|---|---|---|---|---|---|
| CPU | RAM | I/O Slot | Cycle Time | EtherCAT Slaves | EtherCAT Axes | |||
| EMP-9051-16
|
i5-8365UE | 16 GB | 0 | .5/1/2/4/8 ms | Max. 512 | Max. 16 | ||
| EMP-9051-32
|
Max. 32 | |||||||
| EMP-9251-16
|
2 | Max. 16 | ||||||
| EMP-9251-32
|
Max. 32 | |||||||
| EMP-9651-16
|
6 | Max. 16 | ||||||
| EMP-9651-32
|
Max. 32 | |||||||
| EMP-9091-16
|
Atom E3950 | 8 GB | 0 | Max. 16 | ||||
| EMP-9091-32
|
Max. 32 | |||||||
|
|
||||||||
|
EMP-9008 Series: SoftPLC based Motion Control Series with built-in EtherCAT master
|
||||||||
| Model | ||||||||
|---|---|---|---|---|---|---|---|---|
| CPU | RAM | I/O Slot | Cycle Time | EtherCAT Slaves | EtherCAT Axes | |||
| EMP-9058-16
|
i5-8365UE | 16 GB | 0 | 0.5 ms (min) | Max. 512 | Max. 16 | ||
| EMP-9058-32
|
Max. 32 | |||||||
| EMP-9258-16
|
i5-8365UE | 16 GB | 2 | Max. 16 | ||||
| EMP-9258-32
|
Max. 32 | |||||||
| EMP-9658-16
|
i5-8365UE | 16 GB | 6 | Max. 16 | ||||
| EMP-9658-32
|
Max. 32 | |||||||
| EMP-9098-16
|
Atom E3950 | 8 GB | 0 | Max. 16 | ||||
| EMP-9098-32
|
Max. 32 | |||||||
| Master Series
|
|||||||
|
EMP-2000 Series: SoftPLC based Compact Motion Control Series with built-in EtherCAT master
|
|||||||
| Model | |||||||
|---|---|---|---|---|---|---|---|
| OS | CPU | System Memory | Storage | EtherCAT | |||
| Cycle Time | Number of Slaves | Number of Axes | |||||
| EMP-2848M
|
Real-Time Linux (RT-Preempt) | Cortex-A53, Quad-core, 1.6GHz | LPDDR4 - 1GB | eMMC Flash – 8GB, 4GB microSD card | 500 μs (min.) | 128 | 16 |
| Master Series
|
|||||||
|
EMP-4000 Series : Ultra-compact SoftPLC-based Controller
|
|||||||
| Model | |||||||
|---|---|---|---|---|---|---|---|
| OS | CPU | System Memory | Storage | EtherCAT | |||
| Cycle Time | Number of Slaves | Number of Axes | |||||
| EMP-4648
|
Real-Time Linux (RT-Preempt) | Cortex-A53, Quad-core, 1.4GHz | DDR4 - 2GB | eMMC Flash – 8GB | 500 μs (min.) | 128 | 16 |
|
|
|||||||||
|
Master Series
|
|||||||||
| Model | EtherCAT | Encoder Input | Digital Input & Output | Accessories | |||||
|---|---|---|---|---|---|---|---|---|---|
| Port | Axes | Slave | Cycle Time | Response Speed | Resolution | Channels | Daughter Board | Cable | |
| ECAT-M808 series (2nd Generation) |
1 x RJ-45 | Max. 8 | Max. 512 | 0.5ms | 1 MHz | 32-bit | 13-ch DI & 13-ch DO | - / Yes | - / Yes |
| Max. 16 | |||||||||
| Max. 32 | |||||||||
| Max. 64 | |||||||||
| ECAT-M801 series (1st Generation) |
1 x RJ-45 | Max. 8 | Max. 512 | 1 MHz | 32-bit | 13-ch DI & 13-ch DO | - / Yes | - / Yes | |
| Max. 16 | |||||||||
| Max. 32 | |||||||||
| The ECAT-M808 series is the latest generation of our EtherCAT master cards, featuring an upgraded CPU. It is fully hardware- and software-compatible with the ECAT-M801 series. |
|||||||||
|
|
|||
|
Win-GRAF: Windows based SoftPLC with PLCopen defined Motion Commands
|
|||
| Model | EtherCAT | PLCopen | OPC UA Server |
|---|---|---|---|
| Win-GRAF PC Runtime |
Yes (ECAT-M801 required) |
Yes (ECAT-M801 required) |
Yes |
