Win-GRAF PC Runtime
Windows based SoftPLC Runtime
Features
• Win-GRAF PC Runtime is a Windows based SoftPLC runtime
• Supports Windows 7, 8, 10, 11
• EtherCAT motion control:
• HMI driver for eLogger and Indusoft (AVEVA Edge)
• Programming interfaces for C/C++/C#/LabVIEW

• Supports Windows 7, 8, 10, 11
• EtherCAT motion control:
1. Real-time motion control in conjunction with the EtherCAT master PCIe card ECAT-M801
2. PLCopen function blocks for single and multiple axes control
3. Supports all EtherCAT servo/stepper drives with a CiA402 drive profile
4. Control up to 32-axis with 0.5 ms cycle time
• Communication protocol:
2. PLCopen function blocks for single and multiple axes control
3. Supports all EtherCAT servo/stepper drives with a CiA402 drive profile
4. Control up to 32-axis with 0.5 ms cycle time
1. EtherCAT
2. Modbus TCP/RTU
3. OPC UA server
• Allows third party software integration via shared memory2. Modbus TCP/RTU
3. OPC UA server
• HMI driver for eLogger and Indusoft (AVEVA Edge)
• Programming interfaces for C/C++/C#/LabVIEW
Introduction
The Win-GRAF PC Runtime for Windows is a SoftPLC runtime environment designed for developing and executing SoftPLC applications on a standard/industrial PC with a Windows OS. After the installation of the runtime environment, the Windows PC can be programmed as a PLC using the Win-GRAF workbench.
The SoftPLC supports all five programming language defined by the IEC61131-3 standard, provides extensive programming libraries including motion control and fieldbus libraries.
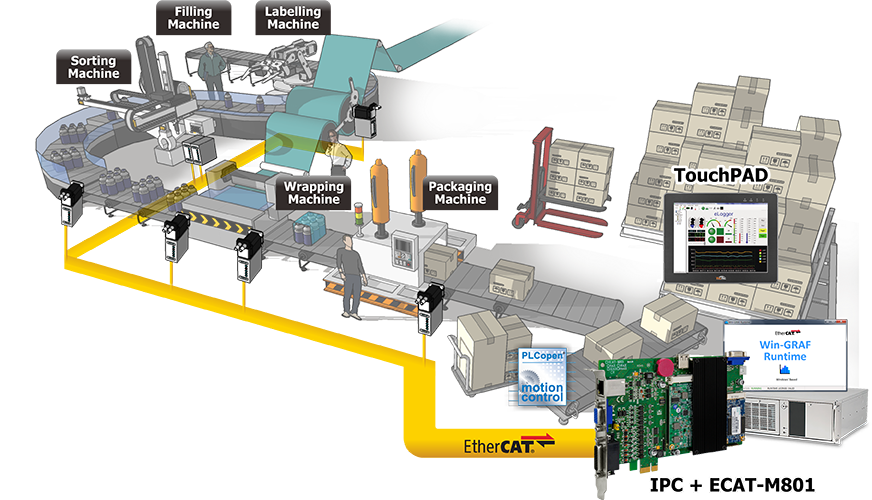
Realtime motion and IO control can be implemented by using the ECAT-M801 series provided by ICPDAS. The ECAT-M801 device is a PCIe card with an integrated real-time EtherCAT master and a multi-axis motion kernel. The motion engine and the EtherCAT master are running on a dedicated processor in a real-time environment to achieve a time-deterministic control of the EtherCAT application. The motion control function blocks are designed according to PLCopen (part 1, 2, 4) and CiA402, are easy to use and greatly reduces learning and development time. The controller can handle up to 512 EtherCAT slaves and up to 32 EtherCAT servo/stepper drives. It supports the implementation of both simple and complex motion control, such as single- and multi-axis movements and interpolation.
A OPC UA server is part of the PLC runtime and is a secure, open, reliable mechanism for transferring information. OPC UA is used for horizontal communication between machines and vertical communication between the machine and higher-level IT system (SCADA, cloud). All standard OPC UA clients can be directly connected to the PLC application without customization thereby reducing integration or application software development costs.
Programming interfaces and shared memory communication are provided to allow Windows applications to directly and rapidly access the PLC data. This enables the system developer to integrate in house developed or third party Windows software, for instance, HMIs, data gathering and processing applications.
Embedded is a software package for configuration, programming and monitoring the SoftPLC application. In addition extensive programming examples are provided.


The SoftPLC supports all five programming language defined by the IEC61131-3 standard, provides extensive programming libraries including motion control and fieldbus libraries.
Realtime motion and IO control can be implemented by using the ECAT-M801 series provided by ICPDAS. The ECAT-M801 device is a PCIe card with an integrated real-time EtherCAT master and a multi-axis motion kernel. The motion engine and the EtherCAT master are running on a dedicated processor in a real-time environment to achieve a time-deterministic control of the EtherCAT application. The motion control function blocks are designed according to PLCopen (part 1, 2, 4) and CiA402, are easy to use and greatly reduces learning and development time. The controller can handle up to 512 EtherCAT slaves and up to 32 EtherCAT servo/stepper drives. It supports the implementation of both simple and complex motion control, such as single- and multi-axis movements and interpolation.
A OPC UA server is part of the PLC runtime and is a secure, open, reliable mechanism for transferring information. OPC UA is used for horizontal communication between machines and vertical communication between the machine and higher-level IT system (SCADA, cloud). All standard OPC UA clients can be directly connected to the PLC application without customization thereby reducing integration or application software development costs.
Programming interfaces and shared memory communication are provided to allow Windows applications to directly and rapidly access the PLC data. This enables the system developer to integrate in house developed or third party Windows software, for instance, HMIs, data gathering and processing applications.
Embedded is a software package for configuration, programming and monitoring the SoftPLC application. In addition extensive programming examples are provided.
Applications

Ordering Information
| PRODUCT SERIES | DESCRIPTION | QNT. | INQUIRY |
|---|---|---|---|
This combination include other products.
Similar Products
| Software | |
|---|---|
| OS | SoftPLC runtime for Windows OS |
| Service | • Support of eLogger and Indusoft • Win-GRAF Workbench : Programming environment (not included in the package) • PLCopen : Single axis and coordinated motion • Shared memory DLL for 3rd party software integration • HMI interfaces for eLogger and Indusoft |
| Utility | EtherCAT Utility Runtime configuration software |
| Interpolation | |
|---|---|
| Circular | any 2- or 3-axis |
| Linear | any 2- or 32-axis |
| Ethernet | |
|---|---|
| Built-In Web Server | Web Server (eLogger or Indusoft required) |
| Protocol | OPC UA Server TCP, UDP Slave/Master for : Modbus TCP/IP , Modbus RTU, ASCII |
| EtherCAT | |
|---|---|
| Protocol | EtherCAT Master (ECAT-M801 required) |
| No. of Axes | Up to 32 axes |
| Cycle Time | DC cycle time 0.5 ms |
