
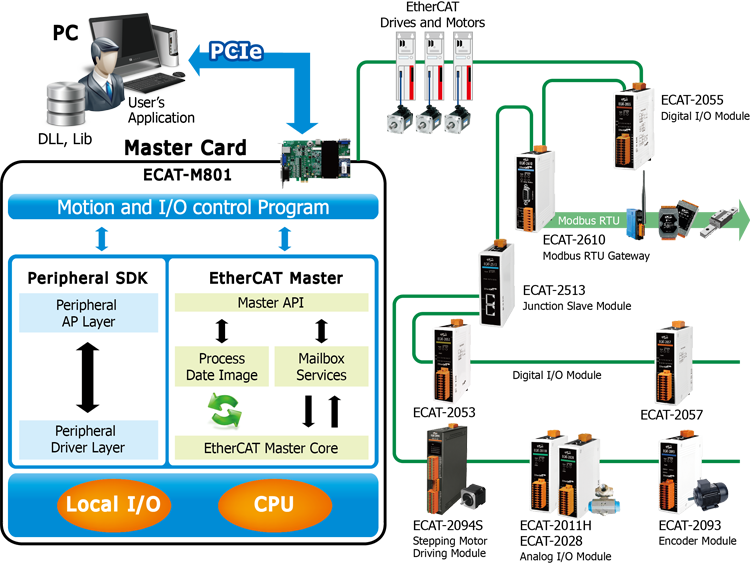
泓格为 EtherCAT 总线提供全方位的产品组件包括主卡、 主站运动控制器及多达几十种的从站。其中包括常见的 I/O、分线器、转换器、网关、运动控制模块等等 .. 应有尽有。使用泓格为 EtherCAT 系统优化实时性的主卡,让您的系统有效的降低系统负荷、提升控制效率及精度、更可以带来更高品质的生产效率。
| EtherCAT主站型号 |  ECAT-M801系列 |
 EMP-9000系列 |
 EMP-2000系列 |
 ECATDAQ |
|
|---|---|---|---|---|---|
| 类型 | PCI Express主站卡 | PAC/PLC控制器 | PLC控制器 | Windows函数库 | |
| 內建数字量I/O通道 | 8 DI & 8 DO 通道 | I/O 扩展元件 | N/A | N/A | |
| 控制周期 | 0.5 ms | 0.5 ms | 0.5 ms | 20 ms | |
| 最多从站数 | 512 站 | 512 站 | 128 站 | 20站 | |
| 支持第三方从站 | V | X | |||
| 步进/伺服马达轴数 | 8~64 轴 | 16~32 轴 | 16 轴 | 8 轴 | |
| 运动控制功能 | •支持 CiA-402 驱动器 •PLCopen •多轴直线/圆弧补间/连续补间/螺旋补间 •运动中改变位置/速度 •T/S曲线加减速 |
•支持CiA-402驱动 •PLCopen •即时性 •单轴运动控制 •T曲线加减速 |
•支援 CiA402 驱动器 PP, HOME 模式 •单轴运动控制 |
||
| 设定工具 | ECAT Utility | IE/Firefox/Chrome浏灠器(网页) | N/A | ||
| 软件(SDK) | •Windows API •Linux API •Demos for C, C++, C#, VB, Python, LabVIEW |
•Windows API •Demos for C, C++, C#, VB, Python, LabVIEW |
N/A | •Windows API •Demos for C, C++, C#, VB, Python, LabVIEW |
|
| 软件(Win-GRAF) | •SoftPLC (Win-GRAF) •OPC UA Server |
N/A | |||
| 备注 | 不需额外安装EtherCAT主站卡 | ||||
特色
 EtherCAT 是用于机械自动化的最快的工业以太网,可连接到 I/O、 伺服电机、步进电机、编码器和智能传感器等等。 EtherCAT 通过以太网实现高速、可靠及高效率数据传输。所有 EtherCAT 从站设备都具有双网口,无需额外的硬件( 如交换机,集线器 或路由器)即可实现便利的网络拓扑。
EtherCAT 是用于机械自动化的最快的工业以太网,可连接到 I/O、 伺服电机、步进电机、编码器和智能传感器等等。 EtherCAT 通过以太网实现高速、可靠及高效率数据传输。所有 EtherCAT 从站设备都具有双网口,无需额外的硬件( 如交换机,集线器 或路由器)即可实现便利的网络拓扑。
EtherCAT是工业以太网
EtherCAT 通信协议是针对程序资料而进行优化,利用标准的 IEEE 802.3 数据帧,数据帧在全双工模式下以 100Mbps 速度传输!
灵活的拓扑
每个设备皆带有两个 EtherCAT 端口,不需要交换机即可建立线性网络。另外可通过 EtherCAT 分线器来建立树型和星型拓扑。
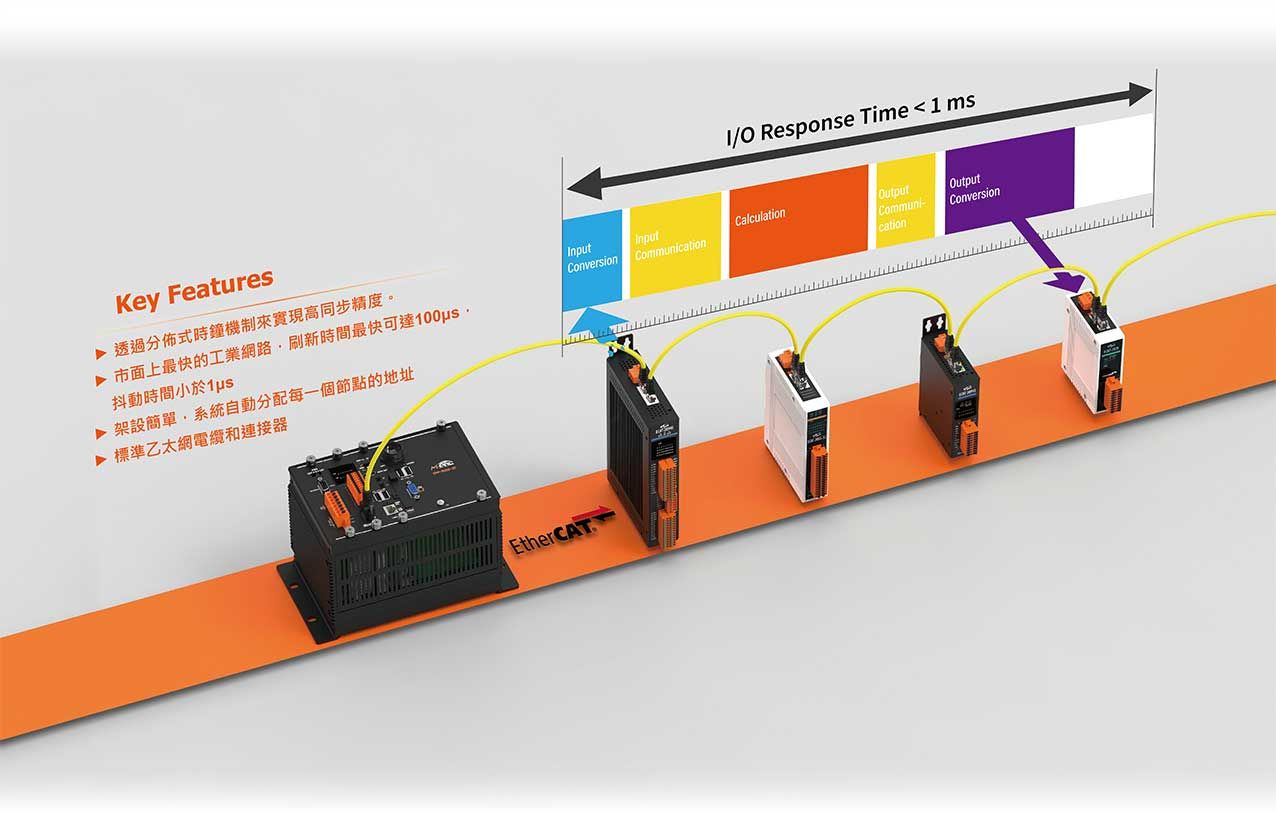
分布式时钟
EtherCAT 从节点测量传入和返回帧之间的时间差:时间戳。通过这些时间戳,主机可以准确地确定到各个从机的传播延迟偏移。这种机制确保设备之间的精确同步,抖动小于1μs。
布线方便
100Base-TX EtherCAT通过标准屏蔽以太网电缆和连接器,非常高效地使用标准100Base-TX以太网通信。无需网络交换机。
使用简单,一连就通
相比于传统的现场总线系统,EtherCAT拥有强大的优势,节点地址可被自动配置,不需要网络调校,集成的诊断信息可精确定位错误,无需配置交换机,也不需要处理复杂的MAC及IP地址。
飞速传输-即时数据交换
从站设备即时提交/置入数据随时保持超高数据吞吐量

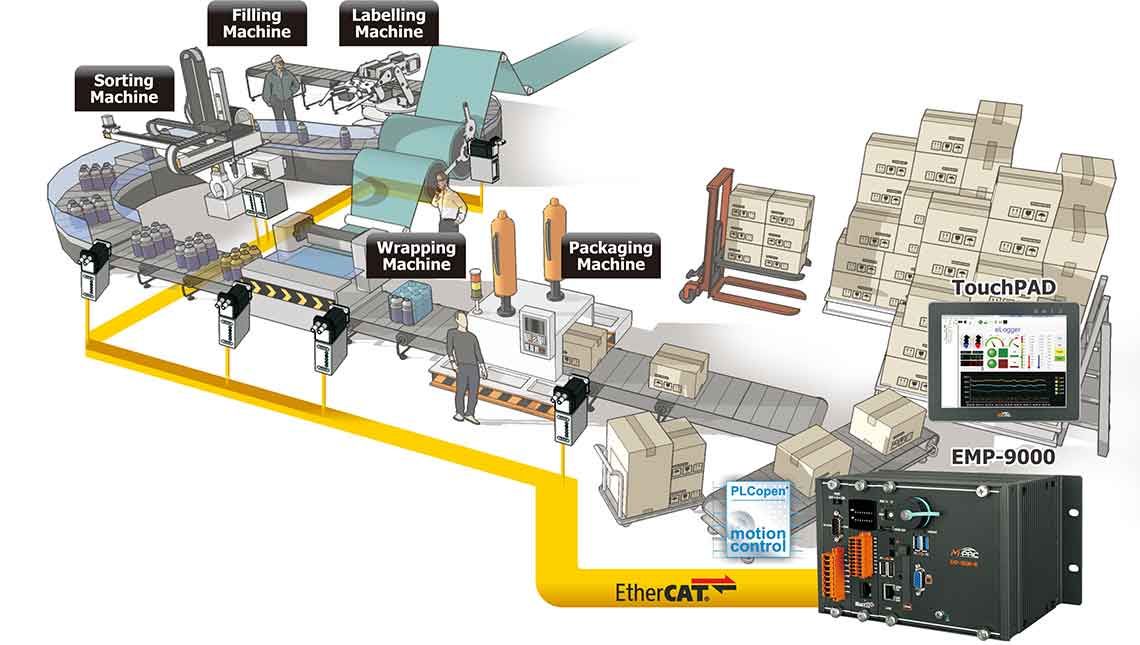
运动控制应用
零部件取放
- 转移与堆叠装置
- 龙门式取放
- 自动拾取、放置、测量和分类零组件
输送系统
- 工件在输送机上的定位
- 搬运和运输设备
- 产品检验
- 在线托盘堆垛机
- 贴标机
零件组装系统
- 精密点焊机
- 密封、胶合、接合应用
- 在表面上添加胶水以连接零件
- 密封:将密封剂涂在零件的接合面上
- 点胶机: 涂胶
仓储
- 自动化的存储和检索系统
- 自动从存储柜中存储和检索托盘
切割,研磨和压制应用
半导体制造
- IC 检查
- IC 晶片安装与组装
- 拾取组件并将它们放置在印刷电路板上
- 摄像头检测:
- 使用移动摄像头检查
- 使用摄像头进行多点检查
机器人控制
- 控制单轴机器人
- 控制用于喷涂应用的多个单轴机器人
- 双驱动器: 同步并移动两个相同类型的单轴机器人
实测过市面上常见驱动器与马达列表
|
公司 |
驱动器 |
马达种类 |
|---|---|---|
|
Delta 台达 |
ASDA A2-E 系列 |
AC 伺服马达 |
|
Hiwin 上银 |
D2 系列 |
AC 伺服马达 |
|
Moons' 鸣志 |
STF/RS 系列 |
两相步进马达 |
|
Mitsubishi 三菱 |
MR-JET |
AC 伺服马达 |
|
Oriental Motor 东方马达 |
AZ 系列多轴驱动器 |
闭回路步进马达 |
|
Panasonic 国际 |
A5B/A6B 系列 |
AC 伺服马达 |
|
Shihlin 士林 |
SDP 系列 |
AC 伺服马达 |
|
Sanyo Denki 山洋电气 |
R 系列 |
AC 伺服马达 |
|
Teco 东元电机 |
JSDG2/JSDG2S |
AC 伺服马达 |
|
Yaskawa 安川电机 |
Sigma 7 系列 |
AC 伺服马达 |
| Master Series
|
||||||||
|
EMP-9000 系列:基于 PAC 的运动控制系列,内置 EtherCAT 主站
|
||||||||
| 型号 | ||||||||
|---|---|---|---|---|---|---|---|---|
| CPU | RAM | I/O Slot | 周期时间 | EtherCAT Slaves | EtherCAT Axes | |||
| EMP-9051-16
|
i5-8365UE | 16 GB | 0 | .5/1/2/4/8 ms | Max. 512 | Max. 16 | ||
| EMP-9051-32
|
Max. 32 | |||||||
| EMP-9251-16
|
2 | Max. 16 | ||||||
| EMP-9251-32
|
Max. 32 | |||||||
| EMP-9651-16
|
6 | Max. 16 | ||||||
| EMP-9651-32
|
Max. 32 | |||||||
| EMP-9091-16
|
Atom E3950 | 8 GB | 0 | Max. 16 | ||||
| EMP-9091-32
|
Max. 32 | |||||||
|
|
||||||||
|
EMP-9000 系列:基于 SoftPLC 的运动控制系列,内置 EtherCAT 主站
|
||||||||
| 型号 | ||||||||
|---|---|---|---|---|---|---|---|---|
| CPU | RAM | I/O Slot | 周期时间 | EtherCAT Slaves | EtherCAT Axes | |||
| EMP-9058-16
|
i5-8365UE | 16 GB | 0 | 0.5 ms (min) | Max. 512 | Max. 16 | ||
| EMP-9058-32
|
Max. 32 | |||||||
| EMP-9258-16
|
i5-8365UE | 16 GB | 2 | Max. 16 | ||||
| EMP-9258-32
|
Max. 32 | |||||||
| EMP-9658-16
|
i5-8365UE | 16 GB | 6 | Max. 16 | ||||
| EMP-9658-32
|
Max. 32 | |||||||
| EMP-9098-16
|
Atom E3950 | 8 GB | 0 | Max. 16 | ||||
| EMP-9098-32
|
Max. 32 | |||||||
| Master Series
|
||||||||
|
EMP-2000 系列:基于 SoftPLC 的紧凑型运动控制系列,内置 EtherCAT 主站
|
||||||||
| 型号 | ||||||||
|---|---|---|---|---|---|---|---|---|
| OS | CPU | 系统记忆体 | 储存装置 | EtherCAT | ||||
| 通讯周期 | 从站数 | 轴数 | ||||||
| EMP-2848M
|
Real-Time Linux (RT-Preempt) | Cortex-A53, Quad-core, 1.6GHz | LPDDR4 - 1GB | eMMC Flash – 8GB, 4GB microSD 卡 | 500 μs (最小周期) | 128 | 16 | |
| Master Series
|
|||||||||
|
Master Series
|
|||||||||
| 型号 | EtherCAT | 編码器 输入 | 数字量输入 & 输出 | 零配件 | |||||
|---|---|---|---|---|---|---|---|---|---|
| Port | Axes | Slave | 周期时间 | 响应速度 | 分辨率 | 通道数 | 端子板 | 线 | |
| ECAT-M801-8AX
|
1 x RJ-45 | Max. 8 | Max. 512 | 0.5ms | 1 MHz | 32-bit | 13-ch DI & 13-ch DO | - | - |
| ECAT-M801-16AX
|
Max. 16 | ||||||||
| ECAT-M801-32AX
|
Max. 32 | ||||||||
| ECAT-M808-64AX
|
Max. 64 | ||||||||
| ECAT-M801-8AX/S
|
1 x RJ-45 | Max. 8 | Max. 512 | 1 MHz | 32-bit | 13-ch DI & 13-ch DO | Yes | Yes | |
| ECAT-M801-16AX/S
|
Max. 16 | ||||||||
| ECAT-M801-32AX/S
|
Max. 32 | ||||||||
| ECAT-M808-64AX/S
|
Max. 64 | ||||||||
|
|
|||
|
Win-GRAF: 基于 Windows 的 SoftPLC,具有 PLCopen 定义的运动命令
|
|||
| 型号 | EtherCAT | PLCopen | OPC UA Server |
|---|---|---|---|
| Win-GRAF PC Runtime |
Yes (ECAT-M801 required) |
Yes (ECAT-M801 required) |
Yes |
