|
|
 |
|
 |
|
|
|
|
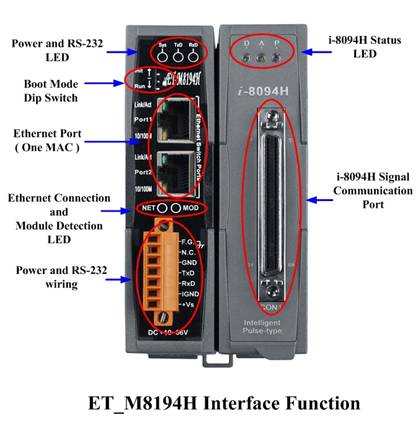
ET-M8194H
Ethernet Remote Unit with High speed 4-axis Motion Module |
 |
 |
 |
|
| |
|
|
|
|
|
|
 |
|
|
|
|
|
|
ET-M8194H is a new product of ICP
DAS to implement the Ethernet remote motion controller for the remote
motion solution.
It includes an I-8094H module (a 4-axis
stepping/pulse-type servo motor control module). By using the
intelligent function of
ET-M8194H, we can reach the remote motion
control to finish various motion application via MODBUS/TCP. Also,
ET-M8194H can be applied in many platforms with MODBUS/TCP protocol
(for example: PC, PAC, PLC). Additionally, it is easy and simple to use
many ET-M8194Hs at the same time to implement the multi-axis motion
control by the serial connection of ET-M8194H. We also provide EzMove
Utility and API Library for users to quickly configure ET-M8194H and
develop their own control applications easily. |
|
|
|
 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
 Users can connect to several ET-M8194Hs to reach the multi-axis motion control by one host. Users can connect to several ET-M8194Hs to reach the multi-axis motion control by one host. |
With MODBUS/TCP
communication, ET-M8194H provides advanced motion control capability
for any platform with a MODBUS
Client. Therefore, users can realize the
various remote motion applications in SCADA, PAC or PLC etc. |
EzMove utility provides the
easy interface on setting and macro programming to help users
familiarize the manipulation of
ET-M8194H quickly. Besides, users can also watch the motion track from EzMove utility. |
Provides API Library for
the development environment (For example: VB, VC and BCB etc.) for
self-developed applications.
Besides, users can also integrate all
ET-M8194H information via Ethernet to reach the concentrated control. |
| Support Hot-Swap function. Users can
hot swap I-8094H module while ET-M8194H is working. |
| Support IP_Lock function. The
specific IP clients can only connect to ET-M8194H for remote control
security. |
|
|
|
 |
|
|
|
|
|
 |
|
|
|
|
|
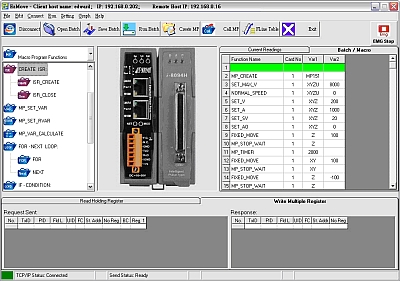
(1) EzMove Utility: |
|
|
| EzMove, developed by ICP DAS, is an easy
configuration utility for the I-8094H on ET-M8194H controller. It is
intended to do the tasks of motion control and movement test on
equipments without prior self-developed applications in the beginning.
Due to being a Modbus client, users can use EzMove to edit Macro
Programs (MP) and download them to I-8094H on ET-M8194H. EzMove can
also display and plot position/velocity of four axis as well as
Modbus/TCP messages for easy reference. |
|
|
|
 |
|
|
|
|
|
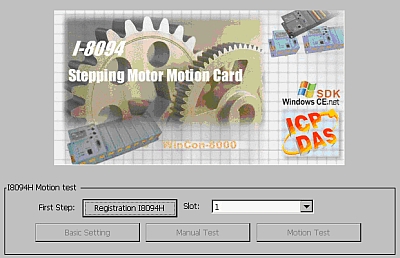
(2) API Library: |
|
|
| ET-M8194H API Library is composed of nine
groups of functions which support VB, VC and BCB IDE. Users can apply
the API Library to edit Macro Programs (MP) and send Modbus/TCP
commands to control or configure I-8094H. Through ET-M8194H API
Library, users can integrate all ET-M8194H controllers via Ethernet for
system integration purpose. Besides, it also gives the flexibility to
develop customized GUI of users’ AP. |
|
|
|
 |
|
|
|
|
|
| Tables of MODBUS
Addresses |
|
|
|
|
| Modbus Function Code 01, 02, 03, 04, 05,
15, 16 are provided to communicate with ET-M8194H controller. The
following tables list Modbus addresses and corresponding function for
each function code. |
|
|
|
|
|
|
(1) FC01、FC02:( Read multiple FRnet DI/Os.
Allow reading across groups. )
|
|
|
| Variable
Name |
Address |
Type |
Comments |
FRnet_DO_0G
FRnet_DI_8G |
0
~ 15 |
R |
Value of FRnet
DO group 0 (16-bit)
Value of FRnet DI group 8 (16-bit) |
FRnet_DO_1G
FRnet_DI_9G |
16
~ 31 |
R |
Value of FRnet
DO group 1 (16-bit)
Value of FRnet DI group 9 (16-bit) |
FRnet_DO_2G
FRnet_DI_10G |
32
~ 47 |
R |
Value of FRnet
DO group 2 (16-bit)
Value of FRnet DI group 10 (16-bit) |
FRnet_DO_3G
FRnet_DI_11G |
48
~ 63 |
R |
Value of FRnet
DO group 3 (16-bit)
Value of FRnet DI group 11 (16-bit) |
FRnet_DO_4G
FRnet_DI_12G |
64
~ 79 |
R |
Value of FRnet
DO group 4 (16-bit)
Value of FRnet DI group 12(16-bit) |
FRnet_DO_5G
FRnet_DI_13G |
80
~ 95 |
R |
Value of FRnet
DO group 5 (16-bit)
Value of FRnet DI group 13(16-bit) |
FRnet_DO_6G
FRnet_DI_14G |
96
~ 111 |
R |
Value of FRnet
DO group 6 (16-bit)
Value of FRnet DI group 14(16-bit) |
FRnet_DO_7G
FRnet_DI_15G |
112
~ 127 |
R |
Value of FRnet
DO group 7 (16-bit)
Value of FRnet DI group 15(16-bit) |
|
|
|
|
|
|
(2) FC05、FC15:( Write Single/Multiple FRnet
DOs. Allow writing across groups.) |
|
|
| Variable
Name |
Address |
Type |
Comments |
| FRnet_DO_0G |
0
~ 15 |
W |
Value of FRnet
DO group 0 (16-bit) |
| FRnet_DO_1G |
16
~ 31 |
W |
Value of FRnet
DO group 1 (16-bit) |
| FRnet_DO_2G |
32
~ 47 |
W |
Value of FRnet
DO group 2 (16-bit) |
| FRnet_DO_3G |
48
~ 63 |
W |
Value of FRnet
DO group 3 (16-bit) |
| FRnet_DO_4G |
64
~ 79 |
W |
Value of FRnet
DO group 4 (16-bit) |
| FRnet_DO_5G |
80
~ 95 |
W |
Value of FRnet
DO group 5 (16-bit) |
| FRnet_DO_6G |
96
~ 111 |
W |
Value of FRnet
DO group 6 (16-bit) |
| FRnet_DO_7G |
112
~ 127 |
W |
Value of FRnet
DO group 7 (16-bit) |
|
|
|
|
|
|
(3) FC04:( Reads states of I-8094H ) |
|
|
| Variable
Name |
Address |
Type |
Comments |
| DI_ALL_X |
0 |
R |
States of all
DI in X axis |
| DI_ALL_Y |
1 |
R |
States of all
DI in Y axis |
| DI_ALL_Z |
2 |
R |
States of all
DI in Z axis |
| DI_ALL_U |
3 |
R |
States of all
DI in U axis |
| RINT_STATE_ALL |
4 |
R |
Gets all RINT
states. |
| ERROR_STATE |
5 |
R |
Gets error
state (1: error,0: no error) |
| FREE_BUFFER_SIZE |
6 |
R |
Gets current
free buffer size. |
| …..Undefined |
7 |
-- |
|
| FRnet_DI_8G |
8 |
R |
Value of FRnet
DI group 8 (16-bit) |
| FRnet_DI_9G |
9 |
R |
Value of FRnet
DI group 9 (16-bit) |
| FRnet_DI_10G |
10 |
R |
Value of FRnet
DI group 10 (16-bit) |
| FRnet_DI_11G |
11 |
R |
Value of FRnet
DI group 11 (16-bit) |
| FRnet_DI_12G |
12 |
R |
Value of FRnet
DI group 12 (16-bit) |
| FRnet_DI_13G |
13 |
R |
Value of FRnet
DI group 13 (16-bit) |
| FRnet_DI_14G |
14 |
R |
Value of FRnet
DI group 14 (16-bit) |
| FRnet_DI_15G |
15 |
R |
Value of FRnet
DI group 15 (16-bit) |
| ERROR_CODE_X |
16 |
R |
Error code
occurred in X axis |
| ERROR_CODE_Y |
17 |
R |
Error code
occurred in Y axis |
| ERROR_CODE_Z |
18 |
R |
Error code
occurred in Z axis |
| ERROR_CODE_U |
19 |
R |
Error code
occurred in U axis |
| X_DI_0,
Y_DI_0, Z_DI_0, U_DI_0 |
20、30、40、50 |
R |
Driving state
of each axis
1: driving, 0: stop |
| X_DI_1,
Y_DI_1, Z_DI_1, U_DI_1 |
21、31、41、51 |
R |
LMT+ state of
each axis
0: off, 1: on |
| X_DI_2,
Y_DI_2, Z_DI_2, U_DI_2 |
22、32、42、52 |
R |
LMT- state of
each axis
0: off, 1: on |
| X_DI_3,
Y_DI_3, Z_DI_3, U_DI_3 |
23、33、43、53 |
R |
EMG state of
each axis
0: off, 1: on |
| X_DI_4,
Y_DI_4, Z_DI_4, U_DI_4 |
24、34、44、54 |
R |
ALARM state of
each axis
0: off, 1: on |
| X_DI_5,
Y_DI_5, Z_DI_5, U_DI_5 |
25、35、45、55 |
R |
Home (IN1)
sensor state of each axis
0: on, 1: off |
| X_DI_6,
Y_DI_6, Z_DI_6, U_DI_6 |
26、36、46、56 |
R |
Near Home
(IN0) sensor state of each axis.
0: on,
1: off |
| X_DI_7,
Y_DI_7, Z_DI_7, U_DI_7 |
27、37、47、57 |
R |
IN3 sensor
state of each axis
0: on, 1: off |
| X_DI_8,
Y_DI_8, Z_DI_8, U_DI_8 |
28、38、48、58 |
R |
INPOS or Servo
Ready state of each axis.
0: on, 1: off |
| X_DI_9,
Y_DI_9, Z_DI_9, U_DI_9 |
29、39、49、59 |
R |
Z-phase (IN2)
value of each axis
0: on, 1: off |
| Line_Scan_Completed |
60 |
R |
Bit0 of
RINT_STATE |
| MP_Completed |
61 |
R |
Bit1 of
RINT_STATE |
| User-Defined_RINT |
62 |
R |
Bit2 of
RINT_STATE |
| Continuous_Inp_Interrupt |
63 |
R |
Bit3 of
RINT_STATE |
| …..Undefined |
64 |
-- |
|
| …..Undefined |
65 |
-- |
|
| axis_Error |
66 |
R |
Bit6 of
RINT_STATE |
| Module_Error |
67 |
R |
Bit7 of
RINT_STATE |
| Module_ID |
68 |
R |
i8094H:
0x44;i8094A: 0x55 |
| Firmware_Version |
69 |
R |
0x0710 means
Year: 2007 ; Month: 10 |
| X_STOP_STAUTS |
70 |
R |
ETM04_GET_STOP_STATUS()
of X-axis
(1:stop, 0: moving) |
| Y_STOP_STAUTS |
71 |
R |
ETM04_GET_STOP_STATUS()
of Y-axis
(1:stop, 0: moving) |
| Z_STOP_STAUTS |
72 |
R |
ETM04_GET_STOP_STATUS()
of Z-axis
(1:stop, 0: moving) |
| U_STOP_STAUTS |
73 |
R |
ETM04_GET_STOP_STATUS()
of U-axis
(1:stop, 0: moving) |
| |
| X_LATCH |
80 |
R |
Value in
X-axis latch register |
| Y_LATCH |
82 |
R |
Value in
Y-axis latch register |
| Z_LATCH |
84 |
R |
Value in
Z-axis latch register |
| U_LATCH |
86 |
R |
Value in
U-axis latch register |
| |
| TCN |
90 |
R |
Total Modbus
Client Connection Num |
|
|
|
|
|
|
(4) FC16:( For Setting and Control of
I-8094H ) |
|
|
| Variable
Name |
Address |
Type |
Comments |
| FRnet_DO_0G |
0 |
R/W |
Set/Read the
FRnet DO group 0 |
| FRnet_DO_1G |
1 |
R/W |
Set/Read the
FRnet DO group 1 |
| FRnet_DO_2G |
2 |
R/W |
Set/Read the
FRnet DO group 2 |
| FRnet_DO_3G |
3 |
R/W |
Set/Read the
FRnet DO group 3 |
| FRnet_DO_4G |
4 |
R/W |
Set/Read the
FRnet DO group 4 |
| FRnet_DO_5G |
5 |
R/W |
Set/Read the
FRnet DO group 5 |
| FRnet_DO_6G |
6 |
R/W |
Set/Read the
FRnet DO group 6 |
| FRnet_DO_7G |
7 |
R/W |
Set/Read the
FRnet DO group 7 |
| CALL_MPn |
8 |
R/W |
This is a
simple method to call MP. |
| …..Undefined |
9 |
-- |
0 |
| …..Undefined |
10 |
-- |
0 |
| WDT_MP |
11 |
R/W |
If WDT event
happens, system will call this MP. |
| WDT_VALUE |
12 |
R/W |
Timeout value
for the user-defined WDT function. |
| WDT_Enable |
13 |
R/W |
1: enable; 0:
disable |
| |
| Lock_IP |
20 ~ 23 |
R/W |
Lock/Read_Locked
TCP Client IP |
| UnLock_IP |
24 |
W |
Unlock TCP
Client IP |
| ET-M8194H_IP |
25~26 |
R/W |
Set ET-M8194H
IP |
| ET-M8194H_Mask |
27~28 |
R/W |
Set ET-M8194H
Mask |
| ET-M8194H_Gateway |
29~30 |
R/W |
Set ET-M8194H
Gateway |
| |
| LP_X |
90 |
R/W |
Logical
position of X-axis |
| LP_Y |
92 |
R/W |
Logical
position of Y-axis |
| LP_Z |
94 |
R/W |
Logical
position of Z-axis |
| LP_U |
96 |
R/W |
Logical
position of U-axis |
| EP_X |
98 |
R/W |
Encoder
feedback position of X-axis. |
| EP_Y |
100 |
R/W |
Encoder
feedback position of Y-axis. |
| EP_Z |
102 |
R/W |
Encoder
feedback position of Z-axis. |
| EP_U |
104 |
R/W |
Encoder
feedback position of U-axis. |
| CV_X |
106 |
R |
Current
velocity of X-axis. It takes two |
| CV_Y |
108 |
R |
Current
velocity of Y-axis. It takes two |
| CV_Z |
110 |
R |
Current
velocity of Z-axis. It takes two |
| CV_U |
112 |
R |
Current
velocity of U-axis. It takes two |
| CA_X |
114 |
R |
Current
acceleration of X-axis. |
| CA_Y |
116 |
R |
Current
acceleration of Y-axis. |
| CA_Z |
118 |
R |
Current
acceleration of Z-axis. |
| CA_U |
120 |
R |
Current
acceleration of U-axis. |
| |
| bVAR0 |
128 |
R/W |
Value of bVAR0. |
| bVAR1 |
129 |
R/W |
Value of bVAR1. |
| … |
... |
|
bVARn = 128+n |
| bVAR127 |
255 |
R/W |
Value of
bVAR127 |
| |
| VAR0 |
300 |
R/W |
Value of VAR0. |
| VAR1 |
302 |
R/W |
Value of VAR1. |
| … |
... |
|
MSW of VARn =
300+2*n
LSW of VARn = 300+2*n+1 |
| VAR511 |
1322 |
R/W |
Value of
VAR511. |
| |
| MD0 |
3000 |
R/W |
Value of MD0.
( long value ) |
| MD1 |
3002 |
R/W |
Value of MD1.
( long value ) |
| … |
|
|
MSW of MDn =
3000+2*n
LSW of MDn = 3000+2*n+1 |
| MD1023 |
5046 |
R/W |
Value of
MD1023. ( long value ) |
| MD1024 |
5048 |
R/W |
Value of
MD1024. ( float value ) |
| MD1025 |
5050 |
R/W |
Value of
MD1025. ( float value ) |
| … |
... |
|
MSW of MDn =
3000+2*n
LSW of MDn = 3000+2*n+1 |
| MD2047 |
7094 |
R/W |
Value of
MD2047. ( float value ) |
|
|
|
|
|
|
| Variable
Name |
Address |
Type |
Comments |
| Sub_Function_Code |
8000 |
W |
The mapping of
sub function code. |
| Reg1 |
8001 |
W |
Sub Function
parameter 1 |
| Reg2 |
8002 |
W |
Sub Function
parameter 2 |
| Reg3 |
8003 |
W |
Sub Function
parameter 3 |
| Reg4, 5,
6… |
8004, 8005,
8006… |
W |
Sub Function
parameter 4, 5, 6… |
|
|
|
|
|
|
I-8094H Specification:
http://www.icpdas.com/products/Remote_IO/I-8ke/I-8094h-g.htm |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
| ET-M8194H |
Ethernet Remote Automation Unit with High Speed
4-axis Motion Control. |
|
|
|
|
|
|
|
|
|
|
|
|
| DN-8468UB |
Universal 4-axis snap-on Wiring Terminal Board, Din-Rail Mountable |
| DN-8468GB |
General Purpose 4-axis Wiring Terminal Board, Din-Rail Mountable |
| DN-8468MB |
4-axis snap-on Wiring Terminal Board for Mitsubishi MELSERVO-J2 servo amplifier, Din-Rail Mountable |
| DN-8468PB |
4-axis snap-on Wiring Terminal Board for Panasonic MINAS A4/A5 servo amplifier, Din-Rail Mountable |
| DN-8468YB |
4-axis snap-on Wiring Terminal Board for Yaskawa Sigma II/III/V servo amplifier, Din-Rail Mountable |
| DN-8468DB |
4-axis snap-on Wiring Terminal Board for Delta ASDA-A servo amplifier, Din-Rail Mountable |
| DN-8468FB |
4-axis snap-on Wiring Terminal Board for Fuji FALDIC-W servo amplifier, Din-Rail Mountable |
| CA-SCSI15-H |
68-pin SCSI-II
connector Cable for high speed 1.5 M |
| CA-SCSI30-H |
68-pin SCSI-II
connector Cable for high speed 3 M |
| CA-SCSI50-H |
68-pin SCSI-II
connector Cable for high speed 5 M |
|
|
|
|



{kind=link}
{kind=link}
{kind=link}