The CAN (Controller
Area Network) is a serial communication bus especially suited
to interconnect smart devices to build smart systems or sub-system.
It efficiently supports distributed real-time control with a very
high level of security. In CAN networks, there is no addressing
of subscribers or stations in the conventional sense, but instead
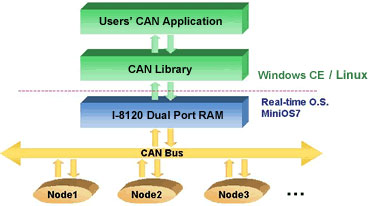
prioritized messages are transmitted. As standalone CAN controller,
I-8120 with WinCon / LinCon series MCU (main control unit) represents an economic
solution. It has one CAN communication port with 5-pin screw
terminal connector, and is useful for a wide range of CAN applications.
Besides, I-8120 uses the new Phillips SJA1000T and transceiver
82C250, which provide both CAN 2.0A and 2.0B specific,
re-transmission function, bus arbitration and error detection. |