ECAT-2094DS
4-Axis Stepper Motor Controller/Driver


Features
• Support CiA402 protocol
• Supports four stepper motors (2-phase bipolar)
• Stepper motors are controlled in an open loop operation
• Programmable coil current level: up to 3.3 A/phase
• Programmable microstep size: maximum 256 microsteps per full step
• Automatic current reduction to reduce heat generation when motor is at standstill
• Distance between stations up to 100 m (100BASE-TX)
• Support daisy chain connection
• Supports four stepper motors (2-phase bipolar)
• Stepper motors are controlled in an open loop operation
• Programmable coil current level: up to 3.3 A/phase
• Programmable microstep size: maximum 256 microsteps per full step
• Automatic current reduction to reduce heat generation when motor is at standstill
• Distance between stations up to 100 m (100BASE-TX)
• Support daisy chain connection
Introduction
The ECAT-2094DS stepper motor controller is a cost-effective, two-phase bipolar stepper driver. The ECAT-2094DS simultaneously controls up to four stepper motors. A motor voltage range between 16 to 29VDC and a maximum motor coil current of 3.3A/phase is being supported. For each motor the maximum running coil current, microstep resolution and other motion parameters are software selectable.
The ECAT-2094DS is a standard EtherCAT SubDevice and an EtherCAT MDevice is required to operate the device. The ECAT-2094DS supports two operation modes: Free-Run and Distributed Clock (DC).
Two-phase bipolar stepper motors can be directly connected to the ECAT-2094DS device. The device is designed to operate the stepper motor in an open loop. Configuration has to be done by the EtherCAT MDevice and the application program. Each stepper motor is being independently controlled by a separated driver IC. The four driver ICs are not synchronized and work independently from each other. The driver automatically controls the torque and position of the motor. An integrated ramp generator automatically calculates the acceleration and deceleration distance. In position mode the controller drives the motor to the target position and in velocity mode accelerates the motor to the target velocity. All motion parameters can be changed on the fly.
The ECAT-2094DS has four integrated incremental encoder interfaces. Four 32 bit high frequency encoder counter counts the input signal of external incremental encoders. The encoder can for example be used for homing purposes and for consistency checks.
High resolution of up to 256 microsteps per full step is supported for a ensuring smooth and precise motor operation.
For each motor three digital input channels are provided:A left and right hardware limit switch and a home switch.The Hardware limit switch which automatically stops the motor when activated, and all three digital inputs can be used for home position search.
The ECAT-2094DS is a standard EtherCAT SubDevice and an EtherCAT MDevice is required to operate the device. The ECAT-2094DS supports two operation modes: Free-Run and Distributed Clock (DC).
Two-phase bipolar stepper motors can be directly connected to the ECAT-2094DS device. The device is designed to operate the stepper motor in an open loop. Configuration has to be done by the EtherCAT MDevice and the application program. Each stepper motor is being independently controlled by a separated driver IC. The four driver ICs are not synchronized and work independently from each other. The driver automatically controls the torque and position of the motor. An integrated ramp generator automatically calculates the acceleration and deceleration distance. In position mode the controller drives the motor to the target position and in velocity mode accelerates the motor to the target velocity. All motion parameters can be changed on the fly.
The ECAT-2094DS has four integrated incremental encoder interfaces. Four 32 bit high frequency encoder counter counts the input signal of external incremental encoders. The encoder can for example be used for homing purposes and for consistency checks.
High resolution of up to 256 microsteps per full step is supported for a ensuring smooth and precise motor operation.
For each motor three digital input channels are provided:A left and right hardware limit switch and a home switch.The Hardware limit switch which automatically stops the motor when activated, and all three digital inputs can be used for home position search.
Applications
• Automated Test Equipment
• Surveillance Systems
• Labeling Machinery
• Packaging
• Semiconductor Manufacturing
• Engraving Machine
• Automatic Feeding Machine
• Surveillance Systems
• Labeling Machinery
• Packaging
• Semiconductor Manufacturing
• Engraving Machine
• Automatic Feeding Machine
Ordering Information
| PRODUCT SERIES | DESCRIPTION | QNT. | INQUIRY |
|---|---|---|---|
This combination include other products.
Similar Products
| EMS Protection | |
|---|---|
| EFT (IEC 61000-4-4) | Signal: 1 KV Class A; Power: 1 KV Class A |
| ESD (IEC 61000-4-2) | 4 KV Contact for each channel |
| Surge (IEC 61000-4-5) | 1 KV Class A |
| LED Indicators | |
|---|---|
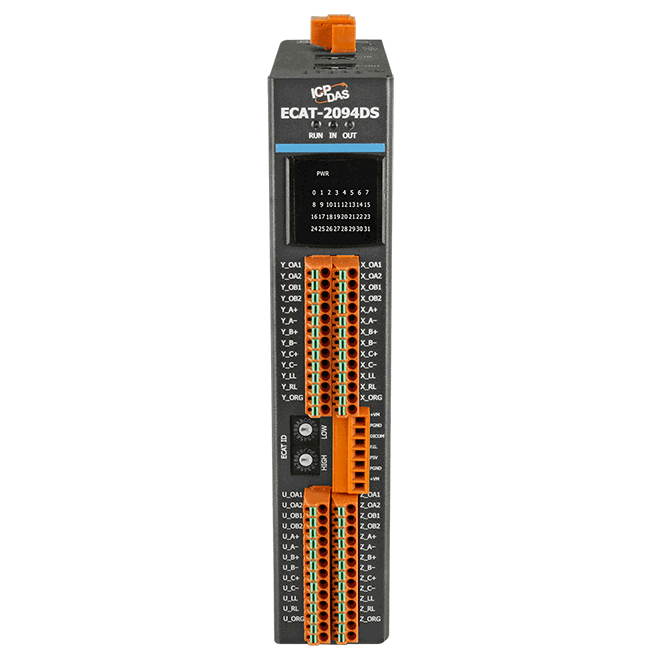
| Status | 1 x Power 1 x Operation State 2 x Communication 12 x DI status 18 x Motion status |
| Encoder Input | |
|---|---|
| No. of Axes | 4, differential |
| Mode | A/B phase, CW/CCW, Pules/Dir |
| Frequency | 1 MHz Max. |
| Motor Output | |
|---|---|
| No. of Axes | 4 |
| Microsteps Per Step | 256, 128, 64, 32, 16, 8, 4, 2 |
| Output Current | 3.3 A/phase |
| Step Frequency | 8.192 MHz Max. |
| Voltage Range of The Motor Output | 16 to 29 VDC |
| Digital Input | |
|---|---|
| Channels | 12 |
| Type | Wet Contact |
| ON Voltage Level | 10 ~ 24 VDC |
| OFF Voltage Level | 4 VDC Max. |
| Isolation | 3750 VDC |
| EtherCAT | |
|---|---|
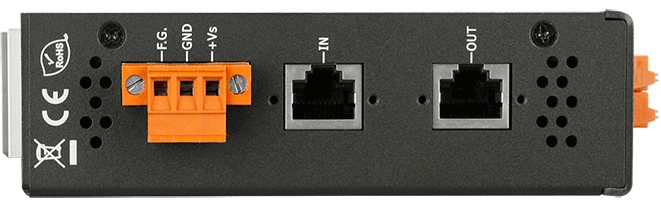
| Ports | 2 x RJ-45 |
| Distance Between Stations | 100 m Max. (100Base-TX) |
| Data Transfer Medium | Ethernet/EtherCAT Cable (Min. CAT 5), Shielded |
| Cycle Time | 0.5 Millisecond |
| Distributed Clocks | Yes |
| Power | |
|---|---|
| Input Range | +20 VDC ~ +30 VDC |
| Mechanical | |
|---|---|
| Casing | Metal |
| Dimensions (mm) | DIN-rail mounting: 37 x 191 x 148 (W x L x H) Wall mounting: 37 x 229 x 142 (W x L x H) |
| Installation | DIN-rail mounting or wall mounting |
| Environment | |
|---|---|
| Operating Temperature | -25 ~ +40 °C |
| Storage Temperature | -30 ~ +80 °C |
| Humidity | 10 ~ 90% RH, Non-condensing |

