|
 |
|
|
|
|
|
 |
| Model:
ET-M8194H |
|
|
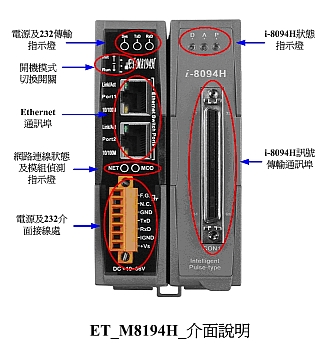
ET-M8194H
乙太網路遠端 控制 4 軸高速運動軸卡 |
 |
 |
 |
|
| |
|
|
|
|
|
|
| |
|
|
|
|
|
|
ET-M8194H 是泓格科技 (ICP DAS) 所開發的 Ethernet 遠端運動控制器, 內含 4 軸高速運動軸卡 I-8094H。能經由標準的 MODBUS/TCP 通訊協定來達成遠端運動控制功能, 並藉由 ET-M8194H 強大的功能完成各種運動控制功能。此外, 使用者可在任何支援 MODBUS/TCP 的平台 (例如: PC, PAC, PLC) 達到對 ET-M8194H 的控制。
另一方面, ET-M8194H 也考慮到接線的方便性, 透過 ET-M8194H 採用的串接連線方式, 可容易同時串接多個 ET-M8194H 使用, 進而達到多軸控制的功能。同時, 為了讓使用者能快速及簡單地完成 ET-M8194H 之控制, ICP DAS 分別提供了 EzMove_Utility 以及 API_Library 兩種軟體功能, 讓使用者可以選擇透過設定方式和自行撰寫程式方式來達成各種遠端
運動控制的應用。 |
|
|
|
|
|
|
 |
|
|
|
|
|
|
|
|
|
|
|
 可使一台主機同時串接多台 ET-M8194H 來達到多軸運動控制功能。 可使一台主機同時串接多台 ET-M8194H 來達到多軸運動控制功能。 |
採用 MODBUS/TCP 通訊格式, 可為任意支援 MODBUS/TCP 平台 (PC/PAC/PLC) 提供高階運動控制之能力, 亦可使用於不同 SCADA
中 (如:InduSoft、Intouch …)。 |
| 提供 EzMove_Utility 軟體, 讓使用者可透過簡單的「設定方式」, 快速
控制或設定 ET-M8194H 並可監看目前運動控制之狀態。 |
提供 API_Library 函式庫, 讓使用者可透過「自行撰寫程式方式」 (
支援 VB, VC, BCB 等開發環境
), 並提供 Demo 範例程式來達成
快速開發客制化之控制程式介面, 同時亦可整合網路上之所有 ET-M8194H 資訊, 達到集中監控目的。 |
| 支援熱插拔 (Hot swap) 功能, 讓使用者在不將 ET-M8194H 斷電之情形下, 即可熱插拔 I-8094H 模組。 |
| 支援鎖定 Modbus Client 端 IP 之功能, 讓所指定 IP 範圍內之用戶端才可連線, 提高網路遠端控制之安全性。 |
|
|
|
|
|
|
|
|
|
 |
|
|
 |
|
|
|
|
|
|
|
|
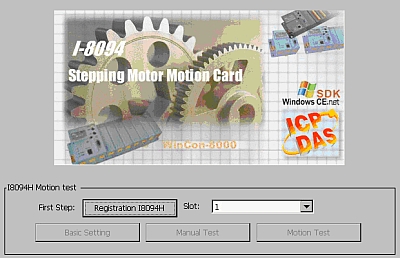
(1) EzMove Utility: |
|
|
| EzMove Utility 是泓格科技針對 ET-M8194H 控制器所提供的一套控制 I-8094H 之工具軟體, 目的讓使用者在 PC 端操作 ET-M8194H 時, 不必撰寫程式, 即可進行機台運動控制、動作比較與測試。由於採用 Modbus/TCP 通訊, 使用者可於 PC 端編寫 I-8094H 之巨集程式, 並經由 Ethernet 下載至 ET-M8194H 控制器 (Modbus Server) 之 I-8094H 模組中, 進行運動控制;此外, EzMove 亦提供即時顯示及繪圖機台運動時各軸的位置與速度值, 以及與 ET-M8194H 通訊的 Modbus/TCP 訊息, 供使用者參考。 |
|
|
|
|
|
|
 |
|
|
|
|
|
(2) API Library: |
|
|
| 在 ICP DAS 所提供之 ET-M8194H API Library Function 中, 共提供了 9 大功能函式, 主要讓使用者在 PC 上可以採用「自行撰寫程式」之方式 ( 支援 VB, VC, BCB 開發環境) 來編輯 I-8094H 中之巨集 (Macro) 功能及下命令控制或讀取 I-8094H 之動作, 同時亦可將網路上多台 ET-M8194H 之控制及資訊進行整合, 以達到系統整體控制的目的, 另外並提供範例程式讓使用者可快速開發客制化之控制程式介面。 |
|
|
|
|
|
|
 |
|
|
|
|
|
|
|
|
|
|
|
| ET-M8194H 共提供了 Modbus Function Code 01、02、03、04、05、15、16 之功能, 以下分別為其 Modbus 位址對應 Motion 功能之對照表 |
|
|
|
|
|
|
(1) FC01、FC02:( 用來讀取多點 FRnet
DI/O 狀態, 可跨 Group 讀取 )
|
|
|
| 變數名稱 |
位址 |
型態 |
說明 |
FRnet_DO_0G
FRnet_DI_8G |
0
~ 15 |
R |
FRnet
DO group 0 的值 (16-bit)
FRnet DI group 8 的值 (16-bit) |
FRnet_DO_1G
FRnet_DI_9G |
16
~ 31 |
R |
FRnet
DO group 1 的值 (16-bit)
FRnet DI group 9 的值 (16-bit) |
FRnet_DO_2G
FRnet_DI_10G |
32
~ 47 |
R |
FRnet
DO group 2 的值 (16-bit)
FRnet DI group 10 的值 16-bit) |
FRnet_DO_3G
FRnet_DI_11G |
48
~ 63 |
R |
FRnet
DO group 3 的值 (16-bit)
FRnet DI group 11 的值 (16-bit) |
FRnet_DO_4G
FRnet_DI_12G |
64
~ 79 |
R |
FRnet
DO group 4 的值 (16-bit)
FRnet DI group 12 的值(16-bit) |
FRnet_DO_5G
FRnet_DI_13G |
80
~ 95 |
R |
FRnet
DO group 5 的值 (16-bit)
FRnet DI group 13 的值 (16-bit) |
FRnet_DO_6G
FRnet_DI_14G |
96
~ 111 |
R |
FRnet
DO group 6 的值 (16-bit)
FRnet DI group 14 的值 (16-bit) |
FRnet_DO_7G
FRnet_DI_15G |
112
~ 127 |
R |
FRnet
DO group 7 的值 (16-bit)
FRnet DI group 15 的值 (16-bit) |
|
|
|
|
|
|
(2) FC05、FC15:( 用來寫入單/多點 FRnet
DO 狀態, 可跨 Group 寫入 ) |
|
|
| 變數名稱 |
位址 |
型態 |
說明 |
| FRnet_DO_0G |
0
~ 15 |
W |
FRnet
DO group 0 的值 (16-bit) |
| FRnet_DO_1G |
16
~ 31 |
W |
FRnet
DO group 1 的值 (16-bit) |
| FRnet_DO_2G |
32
~ 47 |
W |
FRnet
DO group 2 的值 (16-bit) |
| FRnet_DO_3G |
48
~ 63 |
W |
FRnet
DO group 3 的值 (16-bit) |
| FRnet_DO_4G |
64
~ 79 |
W |
FRnet
DO group 4 的值 (16-bit) |
| FRnet_DO_5G |
80
~ 95 |
W |
FRnet
DO group 5 的值 (16-bit) |
| FRnet_DO_6G |
96
~ 111 |
W |
FRnet
DO group 6 的值 (16-bit) |
| FRnet_DO_7G |
112
~ 127 |
W |
FRnet
DO group 7 的值 (16-bit) |
|
|
|
|
|
|
(3) FC04:( 用來讀取 i8094H 之狀態 ) |
|
|
| 變數名稱 |
位址 |
型態 |
說明 |
| DI_ALL_X |
0 |
R |
發生在 X 軸的所有 DI 的狀態 |
| DI_ALL_Y |
1 |
R |
發生在 Y 軸的所有 DI 的狀態 |
| DI_ALL_Z |
2 |
R |
發生在 Z 軸的所有 DI 的狀態 |
| DI_ALL_U |
3 |
R |
發生在 U 軸的所有 DI 的狀態 |
| RINT_STATE_ALL |
4 |
R |
取得 RINT 狀態 |
| ERROR_STATE |
5 |
R |
取得錯誤狀態 (1: 錯誤, 0: 無錯誤) |
| FREE_BUFFER_SIZE |
6 |
R |
取得目前 Buffer 中可用 block 的數量 |
| …..Undefined |
7 |
-- |
|
| FRnet_DI_8G |
8 |
R |
FRnet DI group 8 的值 (16-bit) |
| FRnet_DI_9G |
9 |
R |
FRnet DI group 9 的值 (16-bit) |
| FRnet_DI_10G |
10 |
R |
FRnet DI group 10 的值 (16-bit) |
| FRnet_DI_11G |
11 |
R |
FRnet DI group 11 的值 (16-bit) |
| FRnet_DI_12G |
12 |
R |
FRnet DI group 12 的值 (16-bit) |
| FRnet_DI_13G |
13 |
R |
FRnet DI group 13 的值 (16-bit) |
| FRnet_DI_14G |
14 |
R |
FRnet DI group 14 的值 (16-bit) |
| FRnet_DI_15G |
15 |
R |
FRnet DI group 15 的值 (16-bit) |
| ERROR_CODE_X |
16 |
R |
發生在 X 軸的詳細錯誤原因 |
| ERROR_CODE_Y |
17 |
R |
發生在 Y 軸的詳細錯誤原因 |
| ERROR_CODE_Z |
18 |
R |
發生在 Z 軸的詳細錯誤原因 |
| ERROR_CODE_U |
19 |
R |
發生在 U 軸的詳細錯誤原因 |
| X_DI_0,
Y_DI_0, Z_DI_0, U_DI_0 |
20、30、40、50 |
R |
各軸的驅動 (driving) 狀
態。
1: driving, 0: stop |
| X_DI_1,
Y_DI_1, Z_DI_1, U_DI_1 |
21、31、41、51 |
R |
各軸的正極限 (LMT+) 狀態。
0: off, 1: on |
| X_DI_2,
Y_DI_2, Z_DI_2, U_DI_2 |
22、32、42、52 |
R |
各軸的負極限 (LMT-) 狀態。
0: off, 1: on |
| X_DI_3,
Y_DI_3, Z_DI_3, U_DI_3 |
23、33、43、53 |
R |
各軸的緊急開關 (EMG) 狀態。
0: off, 1: on |
| X_DI_4,
Y_DI_4, Z_DI_4, U_DI_4 |
24、34、44、54 |
R |
各軸的警告
(ALARM) 狀態。
0: off, 1: on |
| X_DI_5,
Y_DI_5, Z_DI_5, U_DI_5 |
25、35、45、55 |
R |
各軸的原點 (HOME,
IN1) 感測器狀態。
0: on, 1: off |
| X_DI_6,
Y_DI_6, Z_DI_6, U_DI_6 |
26、36、46、56 |
R |
各軸的接近原點 (NHOME,
IN0) 感測器狀態。
0: on, 1: off |
| X_DI_7,
Y_DI_7, Z_DI_7, U_DI_7 |
27、37、47、57 |
R |
各軸的 IN3 感測器狀態。
0: on, 1: off |
| X_DI_8,
Y_DI_8, Z_DI_8, U_DI_8 |
28、38、48、58 |
R |
各軸的 INPOS 或 Servo
Ready 狀態。
0: on, 1: off |
| X_DI_9,
Y_DI_9, Z_DI_9, U_DI_9 |
29、39、49、59 |
R |
各軸的 Z-相 (Z-phase,
IN2) 值。
0: on, 1: off |
| Line_Scan_Completed |
60 |
R |
RINT_STATE 的 Bit0 |
| MP_Completed |
61 |
R |
RINT_STATE 的 Bit1 |
| User-Defined_RINT |
62 |
R |
RINT_STATE 的 Bit2 |
| Continuous_Inp_Interrupt |
63 |
R |
RINT_STATE 的 Bit3 |
| …..Undefined |
64 |
-- |
|
| …..Undefined |
65 |
-- |
|
| Axes_Error |
66 |
R |
RINT_STATE 的 Bit6 |
| Module_Error |
67 |
R |
RINT_STATE 的 Bit7 |
| Module_ID |
68 |
R |
i8094H:
0x44;i8094A: 0x55 |
| Firmware_Version |
69 |
R |
0x0710 表示
年: 2007 ; 月: 10 |
| X_STOP_STAUTS |
70 |
R |
X 軸 的 ETM04_GET_STOP_STATUS()
(1: 停止, 0: 移動) |
| Y_STOP_STAUTS |
71 |
R |
Y 軸 的 ETM04_GET_STOP_STATUS()
(1:停止, 0: 移動) |
| Z_STOP_STAUTS |
72 |
R |
Z 軸 的 ETM04_GET_STOP_STATUS()
(1:停止, 0: 移動) |
| U_STOP_STAUTS |
73 |
R |
U 軸 的 ETM04_GET_STOP_STATUS()
(1:停止, 0: 移動) |
| |
| X_LATCH |
80 |
R |
X 軸 閂鎖暫存器的值 |
| Y_LATCH |
82 |
R |
Y 軸 閂鎖暫存器的值 |
| Z_LATCH |
84 |
R |
Z 軸 閂鎖暫存器的值 |
| U_LATCH |
86 |
R |
U 軸 閂鎖暫存器的值 |
| |
| TCN |
90 |
R |
Modbus
Client 的總連線數目 |
|
|
|
|
|
|
(4) FC16:( 用來設定及控制 I-8094H 功能 ) |
|
|
| 變數名稱 |
位址 |
型態 |
說明 |
| FRnet_DO_0G |
0 |
R/W |
設定/讀取 FRnet DO 的 group 0 |
| FRnet_DO_1G |
1 |
R/W |
設定/讀取 FRnet DO 的 group 1 |
| FRnet_DO_2G |
2 |
R/W |
設定/讀取 FRnet DO 的 group 2 |
| FRnet_DO_3G |
3 |
R/W |
設定/讀取 FRnet DO 的 group 3 |
| FRnet_DO_4G |
4 |
R/W |
設定/讀取 FRnet DO 的 group 4 |
| FRnet_DO_5G |
5 |
R/W |
設定/讀取 FRnet DO 的 group 5 |
| FRnet_DO_6G |
6 |
R/W |
設定/讀取 FRnet DO 的 group 6 |
| FRnet_DO_7G |
7 |
R/W |
設定/讀取 FRnet DO 的 group 7 |
| CALL_MPn |
8 |
R/W |
此為呼叫 MP 的簡易方法 |
| …..Undefined |
9 |
-- |
0 |
| …..Undefined |
10 |
-- |
0 |
| WDT_MP |
11 |
R/W |
若發生 WDT 事件, 統將會呼叫此 MP. |
| WDT_VALUE |
12 |
R/W |
使用者自訂 WDT 功能的逾時值. |
| WDT_Enable |
13 |
R/W |
1: 開啟; 0:
關閉 |
| |
| Lock_IP |
20 ~ 23 |
R/W |
鎖定/讀取鎖定 (Read_Locked)
TCP Client IP |
| UnLock_IP |
24 |
W |
將 TCP
Client 的 IP 解鎖 |
| ET-M8194H_IP |
25~26 |
R/W |
設定 ET-M8194H
的 IP |
| ET-M8194H_Mask |
27~28 |
R/W |
設定 ET-M8194H
的 Mask |
| ET-M8194H_Gateway |
29~30 |
R/W |
設定 ET-M8194H
的 Gateway |
| |
|
|
|
| LP_X |
90 |
R/W |
X 軸的邏輯位置 |
| LP_Y |
92 |
R/W |
Y 軸的邏輯位置 |
| LP_Z |
94 |
R/W |
Z 軸的邏輯位置 |
| LP_U |
96 |
R/W |
U 軸的邏輯位置 |
| EP_X |
98 |
R/W |
X 軸的轉速感測器回授 (Encoder
Feedback) 位置. |
| EP_Y |
100 |
R/W |
Y 軸的轉速感測器回授位置. |
| EP_Z |
102 |
R/W |
Z 軸的轉速感測器回授位置. |
| EP_U |
104 |
R/W |
U 軸的轉速感測器回授位置. |
| CV_X |
106 |
R |
X 軸的流速. 它採用 2 個. |
| CV_Y |
108 |
R |
Y 軸的流速. 它採用 2 個. |
| CV_Z |
110 |
R |
Z 軸的流速. 它採用 2 個. |
| CV_U |
112 |
R |
U 軸軸的流速. 它採用 2 個. |
| CA_X |
114 |
R |
X 軸的電流加速度. |
| CA_Y |
116 |
R |
Y 軸的電流加速度. |
| CA_Z |
118 |
R |
Z 軸的電流加速度. |
| CA_U |
120 |
R |
U 軸的電流加速度. |
| |
| bVAR0 |
128 |
R/W |
bVAR0 的值. |
| bVAR1 |
129 |
R/W |
bVAR1 的值. |
| … |
... |
|
bVARn = 128+n |
| bVAR127 |
255 |
R/W |
bVAR127 的值. |
| |
| VAR0 |
300 |
R/W |
VAR0 的值. |
| VAR1 |
302 |
R/W |
VAR1 的值. |
| … |
... |
|
VARn 的 MSW =
300+2*n
VARn 的 LSW = 300+2*n+1 |
| VAR511 |
1322 |
R/W |
VAR511 的值. |
| |
| MD0 |
3000 |
R/W |
MD0 的值.
(長整數值) |
| MD1 |
3002 |
R/W |
MD1的值.
(長整數值) |
| … |
|
|
MDn 的 MSW =
3000+2*n
MDn 的 LSW = 3000+2*n+1 |
| MD1023 |
5046 |
R/W |
MD 的值. (長整數值) |
| MD1024 |
5048 |
R/W |
MD1024 的值. (浮點數值) |
| MD1025 |
5050 |
R/W |
MD1025 的值. (浮點數值) |
| … |
... |
|
MDn 的 MSW =
3000+2*n
MDn 的 LSW = 3000+2*n+1 |
| MD2047 |
7094 |
R/W |
MD2047 的值. (浮點數值) |
|
|
|
|
|
|
| 變數名稱 |
位址 |
型態 |
說明 |
| Sub_Function_Code |
8000 |
W |
子功能碼對應 |
| Reg1 |
8001 |
W |
子功能 參數 1 |
| Reg2 |
8002 |
W |
子功能 參數 2 |
| Reg3 |
8003 |
W |
子功能 參數 3 |
| Reg4, 5,
6… |
8004, 8005,
8006.. |
W |
子功能 參數 4, 5, 6… |
|
|
|
|
|
|
I-8094H 規格:
http://www.icpdas.com/products/Remote_IO/I-8ke/I-8094h-g.htm |
|
|
|
|
|
|
|
|
|
|
|
| ET-M8194H |
乙太網路遠程自動化單元 與 4 軸 高速運動軸卡. |
|
|
|
|
|
|
|
|
|
|
|
|
| DN-8468UB |
通用型 4 軸快速配線板, 且具鋁軌嵌住裝置 |
| DN-8468GB |
一般通用之 4 軸配線板, 且具鋁軌嵌住裝置 |
| DN-8468MB |
三菱 MELSERVO-J2 系列伺服驅動器專用 4 軸快速配線板, 且具有鋁軌嵌住裝置 |
| DN-8468PB |
Panasonic MINAS A4/A5 系列伺服驅動器專用 4 軸快速配線板, 且具有鋁軌嵌住裝置 |
| DN-8468YB |
Yaskawa Sigma II/III/V 系列伺服驅動器專用 4 軸快速配線板, 且具有鋁軌嵌住裝置 |
| DN-8468DB |
台達 ADSA-A 系列伺服驅動器專用 4 軸快速配線板, 且具有鋁軌嵌住裝置 |
| DN-8468FB |
Fuji FALDIC-W 系列伺服驅動器專用 4 軸快速配線板, 且具有鋁軌嵌住裝置 |
| CA-SCSI15-H |
68 腳位 SCSI-Ⅱ 接頭線材, 高速用, 長 1.5 公尺. |
| CA-SCSI30-H |
68 腳位 SCSI-Ⅱ 接頭線材, 高速用, 長 3 公尺. |
| CA-SCSI50-H |
68 腳位 SCSI-Ⅱ 接頭線材, 高速用, 長 5 公尺. |
|
|
|
|


{kind=link}
{kind=link}
{kind=link}