|
|
 |
|
|
|
| |
|
|
| |
|
PISO-CPM100-D / PISO-CPM100-T
PISO-CPM100U-D / PISO-CPM100U-T
1 Port Intelligent CANopen Master Universal PCI Board |
|
|
| |
| |
|
|
|
|
| |
PISO-CPM100-D
|
PISO-CPM100-T
|
|
| |
|
|
|
| |
PISO-CPM100U-D
|
PISO-CPM100U-T
|
|
|
|
|
| |
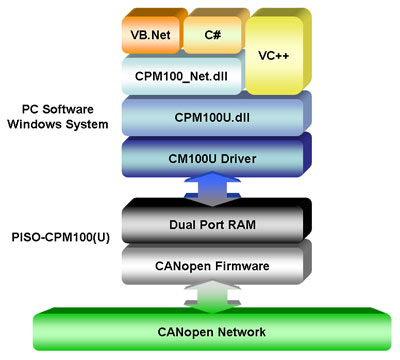
The PISO-CPM100
gives a very powerful and economic solution of an active CANopen
master device with one CAN channel. It uses the NXP SJA1000T
and 82C250 to be the CAN controller and transceiver, which provide
bus arbitration, error detection with auto correction and re-transmission
function. The 16-bit on-board microcontroller with real-time O.S.,
MiniOS7, allows many features, such as real-time message transmission
and reception, filtering, preprocessing, and storage of CAN messages.
Under the effect of the powerful microcontroller, this card can
be made for one CAN controller manager without losing data, even
in systems with a high PCI bus load. Therefore, the CANopen critical
process can be implemented |
|
| |
directly by
CANopen firmware in the PISO-CPM100. In addition, users can develop
their CANopen application by using the CANopen library on the
host computer. When the PISO-CPM100 is active, the data exchange
between users’ application and CANopen firmware is performed via
the memory mapping method of the PISO-CPM100. |
_s.jpg) |
|
|
|
|
| |
|
|
| |
|
|
| |
• Industrial
Machinery • Building Automation • Medical • Maritime • Restaurant Appliances
• Laboratory Equipment & Research
 |
|
| |
|
|
|
|
|
| |
|
|
| |
|
|
| |
-
One CANopen master communication port
-
Standard CANopen specification CiA 301 v4.02
-
Support node id 1 ~ 127
-
Programmable bauds:10 K, 20 K, 50 K, 125 K, 250 K, 500 K, 800 K, and 1M bps
-
Scan function for scanning all nodes on the same CANopen network
-
Provide master listen mode for monitoring without bothering the CANopen network
-
Support both Node Guarding Protocol and Heartbeat Consumer Protocol
-
Provide event trigger function for EMCY event, Node Guarding event and Heartbeat event
-
Provide Event-triggered, remote-requested, cyclic and acyclic SYNC of PDO mode
-
The PDO communication supports single byte output so that users can just modify the value of one byte without changing the others
-
Allow dynamic PDO mapping
-
Allow to get several PDO data simultaneously
-
The SDO communication supports segment protocol
-
Programmable master node ID for the CANopen slave function
-
Support EDS file
-
Allow the automatic adding the node while it boots up
-
Support multi-master architecture
-
CPMUtility utility tool for testing users' CANopen network
-
Provide VC++,VB.Net, and C# (2005) demos and function libraries
|
|
| |
|
|
|
|
|
| |
|
|
| |
|
|
| |
|
|
| |
|
|
|
|
|
| |
|
|
| |
|
|
| |
|
|
| |
|
|
|
|
|
| |
|
|
| |
|
|
| |
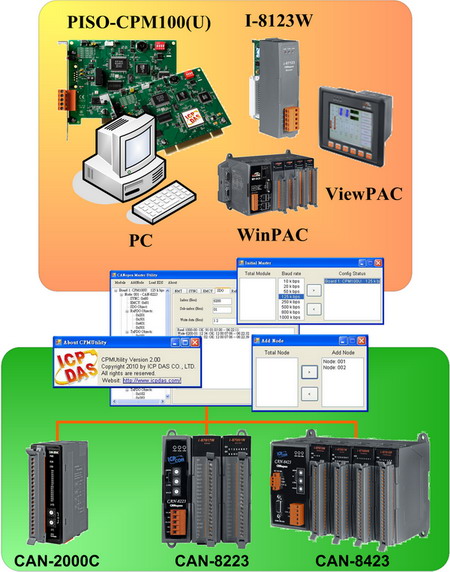
The software utility can easily to access the I/O data of all the slave devices. The users can monitor the input data of the specific slave device and change the output data to the remote slave device with this utility
-
Auto-scan all the CANopen master devices that the CPMUtility has supported
-
Auto-scan all the CANopen slave devices on the CANopen network
-
Support EDS file
-
Dynamic PDO object setting easily
-
Guarding Event and Heartbeat Event detection
-
EMCY message receiving
-
Maximum 5 SYNC message producers per CANopen master
-
Support PISO-CPM100(U), I-8123W, I-7565-CPM for version 2.00 later
-
Support OS: WinCE5.0, and Win2K/XP/Vista/7 with 32-bit system
|
|
| |
|
|
|
|
|
| |
|
|
| |
|
|
| |
| Item |
Description |

InduSoft Driver |
The IndoSoft is one of the famous and high performance SCADA. Nowaday, it supports the CAN, CANopen and DeviceNet driver for all the coresponding converter or master series products. [more...] |
|
|
| |
|
|
|
|
|
| |
|
|
| |
|
|
| |
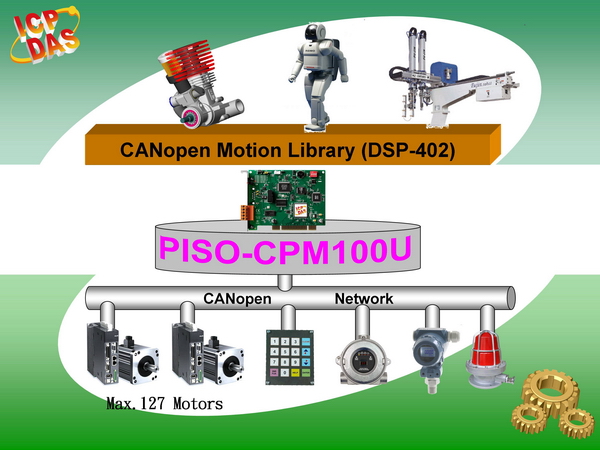
The PISO-CPM100U provides the motion control library now. This library follows the CANopen standard CiA 402. It is available on the Windows 2000/XP/Vista or Win 7(32-bit version) operation system. The CiA 402 is one kind of the standard CANopen application profiles, and specially designed for motion control systems. In addition to making the management of the CANopen motors easy, this communication protocol can reduce the wire connection between the controller and motors, and provide rapid troubleshooting functions. With the PISO-CPM100U and CANopen Motion Library, you can do various motion control functions, such as position control, velocity control, toque control, and synchronous action without having the background knowledge of the complex and abstruse CANopen protocol. The CANopen Motion Library is able to link many CANopen motors so that the multi-axis motion control by one host becomes reachable. While controlling motors, you can also use the APIs of the PISO-CPM100U library to access CANopen remote I/O modules which follows the CiA 401 at the same time. Therefore, building a motion control application becomes more easy and convenient.
Feature:
-
Compliant with CiA 402 v1.1
-
Reduce 50% wires connection cost
-
Physical layer with fault tolerance and anti-noise
-
Support max. 127 motors in one network
-
Absolute and relative position control
-
Velocity control
-
Torque control
-
JOG control
-
Support max. 127 motors synchronous action
-
Various Homing control
-
Support torque limitation with CANopen command
-
Support Win 2000/XP/Vista or Win 7(32-bit version)
Download‥‥ |
|
| |
|
|
|
|
|
| |
|
|
| |
|
|
| |
Performance Test with PISO-CAN 200/400-D/T
Product Name |
PISO-CPM100 |
PISO-CAN-200/400
with CANopen Library |
Protocol decoder |
186 CPU |
PC CPU |
Time stamp |
186 Timer
(0.1 ms)
|
PC Timer
(about 1 ms) |
CPU Loading |
Light |
Heavy |
Performance |
High |
Normal |
Application |
Various and complex CANopen application |
General purpose CANopen application |
CPU:Intel(R) Pentium(R) 4 CPU 2.40 GHz
OS:Microsoft Windows XP Professional Version 2002 Service Pack 2
RAM:512 MB
CAN Baudrate:1000 bps
Function |
PISO-CPM100 (ms) |
PISO-CAN200/400 with CANopen library (ms) |
Add Node |
Average 45.502 |
|
Read 4 bytes data by SDO |
Average 2.487 |
|
Read 9 bytes data by SDO |
Average 2.971 |
|
Write 4 bytes data by SDO |
Average 2.479 |
|
Read 8 bytes data by PDO |
Average 2.355 |
|
Write 8 bytes data by PDO |
Average 1.738 |
0.13 |
Note 1: |
The data of above list is average of 1000 message. |
Node 2: |
If user use the guarding function with PISO-CAN200/400 with CANopen library, the guard error event may be occured when the slave is more and the guarding time is shorter. This is because of that the accuracy of timer of windows is not enough. |
|
|
| |
|
|
|
|
|
| |
|
|
| |
|
|
| |
Model Name |
PISO-CPM100-D |
PISO-CPM100-T |
PISO-CPM100U-D |
PISO-CPM100U-T |
Hardware
|
CPU |
80186, 80 MHz or compatible
|
SRAM/Flash/EEPROM |
512 KB / 512 KB / 2 KB
|
Bus Interface
|
Type |
PCI bus, 5 V, 33 MHz, 32-bit, plug and play.
|
Universal PCI supports both 5 V and 3.3 V PCI bus
|
Board No. |
By DIP switch
|
CAN Interface
|
Controller |
NXP SJA1000T with 16 MHz clock
|
NXP SJA1000T with 16 MHz clock
Microprocessor inside with 80186 80 MHz
|
Transceiver |
NXP 82C250
|
Channel number |
1
|
Connector |
9-pin male D-Sub (CAN_L, CAN_SHLD, CAN_H, N/A for others) |
5-pin screwed terminal block (CAN_L, CAN_SHLD, CAN_H, N/A for others) |
9-pin male D-Sub (CAN_L, CAN_SHLD, CAN_H, N/A for others) |
5-pin screwed terminal block (CAN_L, CAN_SHLD, CAN_H, N/A for others) |
Baud Rate (bps) |
10 k, 20 k, 50 k, 125 k, 250 k, 500 k, 800 k, 1 M
|
Transmission Distance (m) |
Depend on baud rate (for example, max. 1000 m at 50 kbps )
|
Isolation |
1000 VDC for DC-to-DC, 2500 Vrms for photo-couple
|
3000 VDC for DC-to-DC, 2500 Vrms for photo-couple
|
Terminator Resistor |
Jumper for 120 Ω terminator resistor
|
Specification |
ISO-11898-2, CAN 2.0A and CAN 2.0B
|
Protocol |
CANopen CiA 301 v4.02
|
LED
|
Round LED |
Green LED, Red LED
|
Software
|
Driver |
Windows 98/ME/NT/2K/XP
|
Windows 2K/XP
|
Library |
VB 6.0, VC++ 6.0, BCB 6.0
|
Power
|
Power supply |
Unregulated +10 ~ +30 VDC
|
-
|
Power Consumption |
300 mA @ 5 V
|
Mechanism
|
Dimensions |
127mm x 22mm x 121mm (W x L x H)
|
138 mm x 22mm x 127 mm (W x L x H)
|
Environment
|
Operating Temp. |
0 ~ 60 ℃
|
Storage Temp. |
-20 ~ 80 ℃
|
Humidity |
0 ~ 95% RH, non-condensing
|
|
|
| |
|
|
|
|
|
| |
|
|
| |
|
|
| |
PISO-CPM100-D |
CANopen firmware built-in
and one standalone intelligence CAN communication port
with D-sub 9-pin connector
|
PISO-CPM100-T |
CANopen
firmware built-in and One standalone intelligence CAN
communication port with 5-pin screw terminal connector |
PISO-CPM100U-D |
1 Port Intelligent CANopen Master Universal PCI Board with D-Sub 9-pin male connector |
PISO-CPM100U-T |
1 Port Intelligent CANopen Master Universal PCI Board with 5-pin screw terminal connector |
|
|
| |
|
|
|
|
|
| |
|
|
| |
|
|
| |
|
CAN bus Connector |
|
9-pin Female D-sub & 3-wire CAN bus cable (1M) |
|
7/14 channel Surge Protector |
|
EMI Ferrite Split/Snap-On Core
|
|
Field-Installation A-coded 5-pin Female
|
|
EMI Ferrite Split/Snap-On Core
|
|
Field-Installation A-coded 5-pin Female
|
|
|
| |
|
|
| |
|
|
|
|