 |
ECAT-2091S power supply and EtherCAT interfaces |
| Name |
Signal |
| F.G |
Frame ground |
| GND |
Power supply: Ground 0V (from negative power contact) |
| +Vs |
Power supply: +24 VDC (from positive power contact) |
| IN |
EtherCAT signal input |
| OUT |
EtherCAT signal output |
|
| |
|
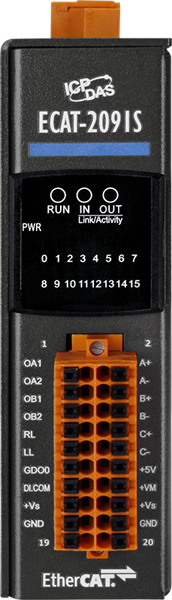 |
Connection interfaces for the motor current outputs, digital inputs and output |
| Name |
Signal |
Signal Description |
| OA1 |
Output |
Motor winding A1 |
| OA2 |
Output |
Motor winding A2 |
| OB1 |
Output |
Motor winding B1 |
| OB2 |
Output |
Motor winding B2 |
| RL |
Input |
Right limit switch for motor |
| LL |
Input |
Left limit switch for motor |
| GDO0 |
Output |
General purpose digital output channel 0 |
| DI.COM |
|
Common DI supply: 0V or +10 to +24VDC
(0V for current sinking) |
| +VS |
|
+24 VDC |
| GND |
|
Ground 0V |
|
| Connection interfaces for the encoder and motor power supply |
| Name |
Signal |
Signal Description |
| A+ |
Input |
Encoder input A+ |
| A- |
Input |
Encoder input A- |
| B+ |
Input |
Encoder input B+ |
| B- |
Input |
Encoder input B- |
| C+ |
Input |
Encoder input C+ |
| C- |
Input |
Encoder input C- |
| +5V |
Output |
Power supply to encoder
Limitation:
The output current should not exceed 150mA
Only one encoder should be connected |
| +VM |
Input |
Motor power supply
+5 to 46VDC
(from positive power contact) |
| +VS |
|
+24 VDC |
| GND |
|
Ground 0V |
|