|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|

|
|
|
|
|
|
 |
|
|
|
|
|
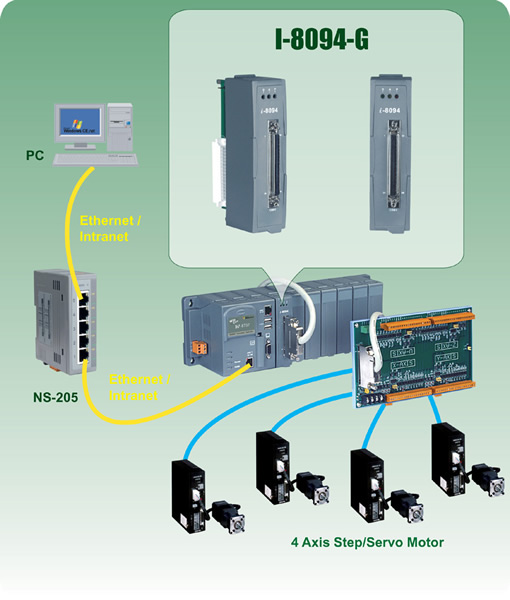
I-8094H 是一個可以在任何泓格科技 (ICPDAS) 的 WinCon 系列控制器使用的 4 軸步進/脈衝型伺服馬達控制模組, 且適用於一般的運動控制應用. 它擁有和 I-8094 模組相同的功能並多加一個 FRnet 串口, 另外擁有一個內建的 80186
CPU 來執行額外的功能. 其 FRnet 串口可讓該模組輕易地擴充快速遠程 I/O 模組. 此兩線式 FRnet
模組可每隔 2.88 ms 即自動地掃描其 128 個數位輸入 (DI) 與 128 個數位輸出 (DO) 通道.
其內建的 CPU 可讓該模組在沒有 PAC 的情況下, 仍可執行運動控制. 在沒有 PAC 的運作下, 它允許使用者藉由呼叫使用者自訂的副程式 (巨集函數) 來增加額外的功能. 因此, 使用者可建立其特定的技術知識 (know-how) 於此模組中. I-8094H 模組內含一個高效能的 ASIC 運動控制晶片. 除了擁有廣泛的速度範圍, 此種智慧型控制器也內建了多種運動控制功能, 如 二/三 軸線性補間, 兩軸圓形補間, T/S 曲線加速/減速, 各種同步動作, 自動歸回原點...等等.
此外, 大多數的 I-8094H 運動控制函數均以很小的 CPU 負載在執行, 因此馬達趨動時, 仍可監測 WinCon 控制器上模組的運動狀態與其他 I/O 的狀態. 由於 I-8094H 的低 CPU 負載需求, 一台 WinCon 控制器可使用一個或多個運動控制模組. 泓格科技 (ICP DAS) 也提供了各種函數與範例, 以減低使用者的編程時間, 使其成為極具成本效益之解決方案.
|
|
|
|
|
|
|
|
|
|
|
back |
|
|
|
|
|
 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
back |
|
|
|
|
|
 |
|
|
|
|
|
- X-Y-Z 機台
- 印刷機
- 搬運機
- 紡織機
- 取放物料機
|
|
|
|
|
|
|
|
|
|
|
back |
|
|
|
|
|
 |
|
|
|
|
|
| 項目 |
詳細說明 |
備註 |
| 補間功能 |
直線補間 (最大補間速度: 4 Mpps) |
單一指令最大 32-bit |
|
圓弧補間
(最大補間速度: 4 Mpps) |
單一指令最大 32-bit |
|
位元模式補間 (最大補間速度: 4 Mpps) |
有 (僅供 I-8000 使用) |
|
連續補間 (最大補間速度: 2 Mpps) |
有 |
| 驅動速度模式 |
最大速度輸出頻率 |
4 Mpps |
|
固定速度脈波輸出 |
有 |
|
梯形 Acc/Dec 驅動 |
有 |
|
非對稱梯形驅動 |
有 |
|
非對稱梯形自動減速驅動 |
有 |
|
S-curve
Acc/Dec 驅動 |
有 |
|
非對稱 S-curve 驅動 |
有 |
|
非對稱 S-curve 自動減速驅動 |
無 |
| 位置控制 |
邏輯位置計算/輸出脈衝寬度 |
32-bit |
|
實際位置計算/輸出脈衝寬度 |
32-bit |
|
位置比對暫存器數 (每軸) |
2 |
|
軟體極限範圍管理 |
有 |
|
環型位置計算 |
有 |
| 自動原點搜尋 |
可為每一軸配置 (4 個步驟), 包含非規則操作處理 |
有 |
|
步驟 1: 高速 "近原點" 搜尋 |
|
|
步驟 2: 低速 原點 搜尋 |
|
|
步驟 3: 低速 編碼器 Z-相位 搜尋 |
|
|
步驟 4: 高速 offset 驅動 |
|
| 同步動作 |
10 個活化係數 (provocatives 或 events) 與 14 個動作 |
有 |
| 外接驅動信號 |
固定/連續脈衝輸出 |
有 |
|
手動輸入接點 |
有 |
| 其他函數 |
驅動期間改變驅動速度 |
有 |
|
驅動期間改變輸出脈波數 |
有 |
|
防止三角速度曲線 |
有 |
| 伺服馬達信號 |
伺服就序 (Servo Ready) 與 警告輸入訊號 / 軸 |
有 |
|
伺服啟動輸出 / 軸 |
有 |
| 其它輸入訊號 |
IN0 (Near Home), IN1 (Home), IN2
(Z-phase), IN3/Axis |
有 |
|
緊急訊號 |
有 |
| 輸入訊號過濾 |
過濾時間參數: 2 ~ 16 ms, 8 stages |
有 |
| 環境 |
操作溫度: -20 ~ +75 °C |
|
|
儲存溫度: -30 ~ +85 °C |
|
|
操作溼度: 10 ~ 85% RH (非結露) |
|
|
儲存溼度: 5 ~ 90% RH (非結露) |
|
|
I/O 信號隔離: 2500 Vrms |
|
| 巨集函數 |
使用者自訂副程式 |
有 |
|
副程式的內容可依據使用者的特殊設定而不同 |
|
|
可線上載入巨集函數 |
|
|
可透過預設的函數呼叫來執行巨集 |
|
|
維持使用者的 know-how 隱私 |
|
| FRnet 介面 |
最多
128 個 DI 與 128 個 DO |
有 |
|
每 2.88 ms 硬體自動掃描
I/O |
|
|
兩線式串列匯流排, 簡單易用. |
|
|
最大通訊距離: 400 M |
|
|
許多 FRnet I/O
端子板與模組, 可搭配使用 |
|
|
|
|
|
|
|
|
|
|
back |
|
|
|
|
|
 |
|
|
|
|
|
| I-8094H-G |
內建 CPU 之
4 軸高速運動控制模塊, 含 FRnet 功能. |
|
|
|
|
|
|
|
|
|
|
back |
|
|
|
|
|
 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
back |
|
|
|
|
|
|