|
|
|
PISO-CPM100-D / PISO-CPM100-T
CANopen Firmware Inside and One Standalone Intelligent CAN Communication Board |
|
|
| |
| |
|
|
|
|
| |
PISO-CPM100-D
~ NEW ~ |
PISO-CPM100-T
~ NEW~ |
|
|
|
|
| |
The PISO-CPM100
gives a very powerful and economic solution of an active CANopen
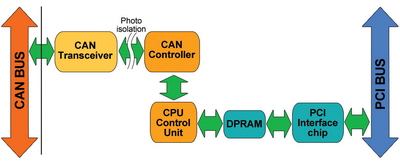
master device with one CAN channel. It uses the NXP SJA1000T
and 82C250 to be the CAN controller and transceiver, which provide
bus arbitration, error detection with auto correction and re-transmission
function. The 16-bit on-board microcontroller with real-time O.S.,
MiniOS7, allows many features, such as real-time message transmission
and reception, filtering, preprocessing, and storage of CAN messages.
Under the effect of the powerful microcontroller, this card can
be made for one CAN controller manager without losing data, even
in systems with a high PCI bus load. Therefore, the CANopen critical
process can be implemented |
|
| |
directly by
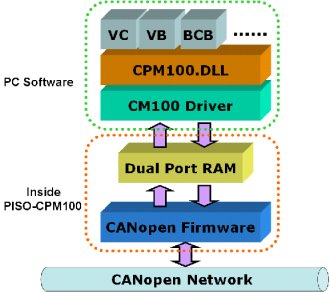
CANopen firmware in the PISO-CPM100. In addition, users can develop
their CANopen application by using the CANopen library on the
host computer. When the PISO-CPM100 is active, the data exchange
between users’ application and CANopen firmware is performed via
the memory mapping method of the PISO-CPM100. |
_s.jpg) |
|
| |
|
|
| |
|
|
| |
|
|
| |
• Industrial
Machinery • Building Automation • Medical • Maritime • Restaurant Appliances
• Laboratory Equipment & Research
 |
|
| |
|
|
| |
|
|
| |
|
|
| |
|
|
| |
-
Microprocessor: 80186, 80Mhz.
-
On board memory: 512K bytes SRAM, 512K
bytes FLASH ROM
-
CAN bus interface: ISO/IS 11898-2, Sub
D9 connector or 5-pin screw terminal connector
-
PCI interface with DPRAM memory mapping
-
Select 120Ω terminator resistor for each
port by jumper
-
33MHz 32bit 5V PCI bus(V2.1) plug and play
mechanism
-
CAN controller: NXP SJA1000T with 16MHz
-
CAN transceiver: NXP 82C250
-
Signal support: CAN_H, CAN_L
-
16 MHz CAN controller frequency
-
Connector: 5-pin screw terminal connector
or 9-pin D-sub connector
-
2500 Vrms isolation on CAN Interface
-
EEPROM: 2K bytes
-
NVRAM: 32 bytes
-
Real Time Clock
-
Built-in Dual-Watchdog protection
-
16-bit Timer
-
Two indication LEDs (Tx/Rx and Err LEDs)
-
Environmental:
Operating temp: 0~60℃
Storage temp: -20~80℃
Humidity: 0~90% non-condensing
Short PC plug-in card, Dimensions: 130mm
X 110mm
|
|
| |
|
|
| |
|
|
| |
|
|
| |
|
|
| |
-
One CANopen master communication port.
-
Standard CANopen specification DS-301 v4.01.
-
Support the CANopen slaves which follow the specification DS-401 v2.1.
-
Each PISO-CPM100 support maximum nodes up to 127.
-
Programmable bauds:10K, 20K, 50K, 125K, 250K, 500K, 800K, and 1M bps.
-
Support node guarding protocol.
-
Support architecture:Single-Master to Multi-Slave, Multi-Master to Multi-Slave, Multi-Master to Single-Slave.
-
Provide Event-triggered, remote-requested, cyclic and acyclic SYNC of PDO mode.
-
The PDO communication supports single digital channel output so that users can just modify the value of one digital channel without changing the others.
-
Allow dynamic PDO mapping
-
The SDO communication supports segment protocol.
-
Support on-line adding and removing devices.
-
Timestamp of CAN message with at least ±1ms precision.
-
Provide VC++,VB, and BCB demos and function libraries
|
|
| |
|
|
| |
|
|
| |
|
|
| |
|
|
| |
|
|
| |
|
|
| |
|
|
| |
|
|
| |
|
|
| |
|
|
| |
|
|
| |
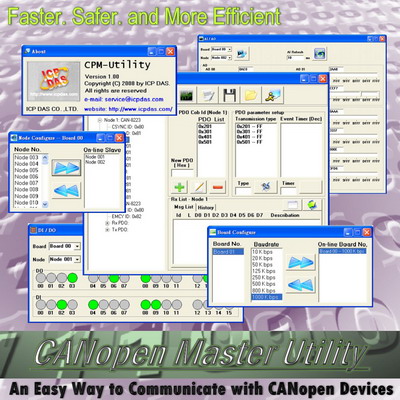
The utility can save all the message that is received by PISO-CPM100 to a text file to help user to analyse the messages.
The software supports the user to configure the CANopen communication setting. And after configuring, user can save the setting into a cpm file for that user want to use the same setting next time.
The software utility can easily to access the I/O data of all the slave devices. The users can monitor the input data of the specific slave device and change the output data to the remote slave device with this utility.
|
|
| |
|
|
| |
|
|
| |
|
Comparison with PISO-CAN 200/400-D/T |
|
|
|
| |
|
|
| |
Performance Test with PISO-CAN 200/400-D/T
Product Name |
PISO-CPM100 |
PISO-CAN-200/400
with CANopen Library |
Protocol decoder |
186 CPU |
PC CPU |
Time stamp |
186 Timer
(0.1 ms)
|
PC Timer
(about 1 ms) |
CPU Loading |
Light |
Heavy |
Performance |
High |
Normal |
Application |
Various and complex CANopen application |
General purpose CANopen application |
CPU:Intel(R) Pentium(R) 4 CPU 2.40 GHz
OS:Microsoft Windows XP Professional Version 2002 Service Pack 2
RAM:512 MB
CAN Baudrate:1000 bps
Function |
PISO-CPM100 (ms) |
PISO-CAN200/400 with CANopen library (ms) |
Add Node |
4 ~ 5 |
1265 ~ 1280 |
Read 4 bytes data by SDO |
1.23 ~ 1.24 |
19.37 ~ 19.47 |
Read 9 bytes data by SDO |
3.62 ~ 3.63 |
58.21 ~ 58.61 |
Write 4 bytes data by SDO |
1.23 ~ 1.24 |
18.81 ~ 19.69 |
Read 8 bytes data by PDO |
1.16 ~ 1.17 |
16.49 ~ 16.57 |
Write 8 bytes data by PDO |
0.29 |
0.13 |
Note 1: |
The data of above list is average of 1000 message. |
Node 2: |
If user use the guarding function with PISO-CAN200/400 with CANopen library, the guard error event may be occured when the slave is more and the guarding time is shorter. This is because of that the accuracy of timer of windows is not enough. |
|
|
| |
|
|
| |
|
|
| |
|
|
| |
|
|
| |
PISO-CPM100-D |
CANopen firmware built-in
and one standalone intelligence CAN communication port
with D-sub 9-pin connector |
PISO-CPM100-T |
CANopen
firmware built-in and One standalone intelligence CAN
communication port with 5-pin screw terminal connector |
|
|
| |
|
|
| |
|
|