The CAN (Controller Area Network) is a serial communication
protocol, and efficiently supports distributed real-time control
with a very high level of security. It is an especially suited
for networking "intelligent" devices as well as sensors
and actuators within a system or sub-system. In CAN networks,
there is no addressing of subscribers or stations in the conventional
sense, but instead prioritized messages are transmitted.
ICP DAS provides an open architecture
platform for CAN bus-PISO CM100. The PISO-CM100 represents a very
powerful and economic solution of an active CAN board with one
CAN channels, covering a wide range of CAN applications. The 16-bit
on-board microcontroller allows, among many other features, the
filtering, preprocessing, and storage (with timestamp) of CAN
messages as well as the real-time transmission of CAN messages.
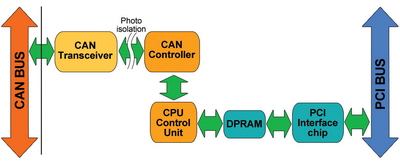
PISO-CM100 also uses the new Phillips SJA1000T and Transceiver
82C250/251, which provide bus arbitration and error detection
with auto correction and re-transmission function. Under the effect
of the powerful microcontroller, this card can be made for one
CAN controller without losing data, even in systems with a high
bus load. Besides, equipped with integrated intelligence functions,
the PIO-CM100 makes it is possible to preprocess CAN data streams,
thus relieving the PC of a considerable burden. As a result, real-time
requirements on the PC applications are drastically reduced. Due
to the state-of-the-art, it can be installed in a slot of 5V 32-bits
PCI bus and supported truly “Plug & play” technology.
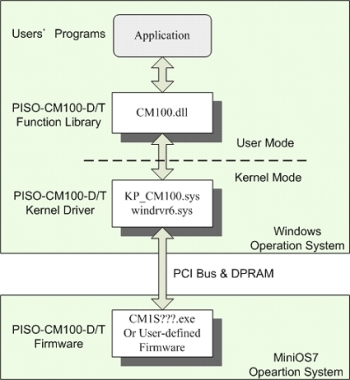
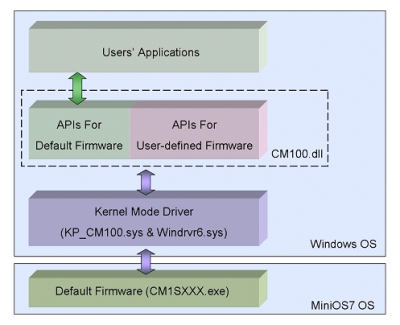
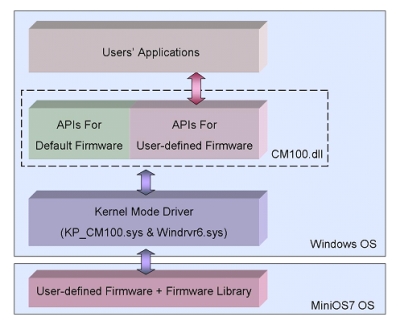
In addition,
users can develop their own CAN application by using the PISO-CM100
library. When the PISO-CM100 is active, the data exchange between
users’ application and can bus firmware is performed via the memory
mapping method of the PISO-CM100. |