|
|
|
|
|
|
|
|
|
|
|
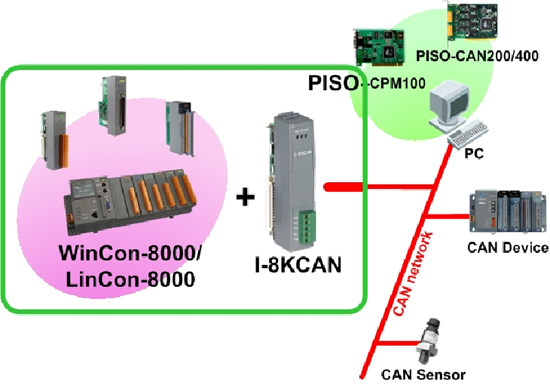
CAN(Controller Area Network)是一種具有高度安全性的串列式通訊協定,主要應用在分散式網路中的即時系統的機器控制與監測,例如,工業機具控制、飛機引擎監控、工廠自動化、醫療設備控制、大樓自動化、遠端資料收集和控制、環境監測... 等等。為了能讓泓格公司的WinCon系列主機以及LinCon系列主機能夠具有高速的CAN網路通訊能力,因此開發了有別於I-87KCAN的CAN介面擴充模組I-8KCAN。此兩者的差異主要在於與主機之間的通訊方式。I-87KCAN適合於通訊較不頻繁的CAN網路上。I-8KCAN則著重於效能上的提升,採用DPRAM達到高速收送CAN資料的目的。在WinCon的平台上,I-8KCAN提供了簡單易用的EVC++函式庫讓使用者開發WinCE作業系統上的應用程式。而在LinCon上,I-8KCAN也提供了GCC的函式庫讓使用者開發CAN的應用程式。因此,I-8KCAN不僅可以幫助使用者更容易快速建立CAN介面的系統,並與泓格公司或其他廠牌的CAN相關產品建立CAN系統的應用網路,其應用架構如下圖所示 : |
|
|
|
|
|
I-8KCAN的特性
- 中央處理器:80186, 80MHz
- 菲力普SJA1000 CAN 控制器搭配16MHz震盪器
- 菲力普82C250 CAN資料傳送器
- 電源LED, 資料傳送/接收LED, 錯誤LED
- 可於WinCon與LinCon上擴充一個CAN介面
- CAN介面端具有2500 Vrms 隔離電源
- Jumper可調式120Ω終端電阻
- 遵循ISO-11898-2的規範
- CAN介面:5接腳的螺絲端子座
- 可容納2K筆CAN 接收訊息的資料緩衝區
- 8K的DPRAM
- 硬體即時時鐘(RTC)
- 預設鮑率共有5Kbps, 10Kbps, 20Kbps, 25Kbps, 50Kbps, 100Kbps, 125Kbps, 200Kbps, 250Kbps, 500Kbps, 800Kbps, 1Mbps等十二種。
- 允許使用者可自訂特殊鮑率
- 電源消耗2W
詳情請參照 :
http://www.icpdas.com/products/Remote_IO/can_bus/I-8kcan.htm |
|
|
|
|
|
|
 |
|
|
|
|